2. Mạch Tiny bootloader
2.1. Chức năng của mạch Tiny bootloader dành cho vi điều khiển PIC
Ta đã có sẵn các chương trình giao tiếp (của máy tính cũng như của vi điều khiển). Tuy nhiên để quá trình truyền nhận dữ liệu thực hiện được ta cần thiết kế thêm một mạch giao tiếp giữa máy tính và vi điều khiển thông qua một chuẩn giao tiếp nào đó. Đó cũng chính là nhiệm vụ của mạch Tiny bootloader. Thực chất có thể hiểu đây chỉ là một mạch giao tiếp đơn thuần.
2.2. Sơ đồ nguyên lí mạch Tiny bootloader
Mạch nguyên lí trong hình 1 được sử dụng để giao tiếp giữa máy tính với vi điều khiển PIC thông qua chuẩn giao tiếp RS232.
Tại ngõ vào của mạch Tiny bootloader ta sử dụng IC MAX232 để thực hiện việc chuyển đổi điện áp của tín hiệu ngõ ra cổng nối tiếp (cổng COM) của máy tính (+10V và –10V) sang điện áp của dạng tín hiệu thông thường (0V và 5V) theo chuẩn giao tiếp RS232. Ngõ ra của mạch sẽ là các tín hiệu TX và TX được nối vào các chân tương ứng của vi điều khiển PIC. Nguồn cung cấp (5V và GND) được lấy trực tiếp từ mạch ứng dụng của vi điều khiển PIC để đưa vào mạch Tiny bootloader, như vậy ta không cần thiết kế thêm nguồn cung cấp riêng cho mạch.
Sơ đồ nguyên lí mạch Tiny Bootloader nguyên thủy (không có chức năng “Reset In Program”) sử dụng 3 chân GND, TX và TX của cổng COM được trình bày trong hình 1.
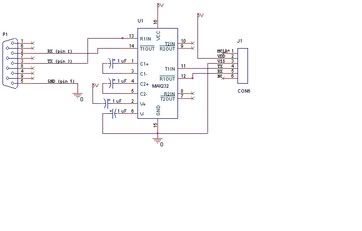 Hình 1 : Sơ đồ nguyên lí mạch Tiny Bootloader nguyên thủy.
Hình 1 : Sơ đồ nguyên lí mạch Tiny Bootloader nguyên thủy.
Để tận dụng tính năng “Reset In Program”, ta tiến hành cải tiến sơ đồ nguyên lí mạch ở hình 1 như sau: nối chân RTS của cổng COM với một ngõ vào của MAX232, và nối ngõ ra tương ứng của chân đó với chân MCLR* của vi điều khiển PIC. Khi Chương trình “tiny Bootloader” được cho phép hoạt động, chân RTS của cổng COM sẽ được kéo lên mức logic cao, và theo nguyên lí hoạt động của MAX232, mức logic của chân ngõ ra tương ứng với ngõ vào đó sẽ ngược với mức logic của ngõ vào, điều này có nghĩa chân MCLR* của PIC được đưa về mức logic 0 và vi điều khiển được reset. Sơ đồ nguyên lí cụ thể của mạch Tiny Bootloader cải tiến được trình bày trong hình 2.
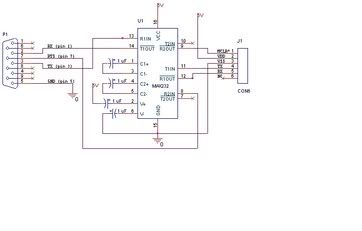 Hình 2 : Sơ đồ nguyên lí mạch Tiny Bootloader cải tiến.
Hình 2 : Sơ đồ nguyên lí mạch Tiny Bootloader cải tiến.
Các hoạt động tiếp theo sau đó là hoạt động truyền nhận các word chương trình giữa máy tính và vi điều khiển. Hoạt động này là sự phối hợp giữa chương trình Tiny Bootloader trên máy tính và firmware Tiny Bootloader được nạp vào vi điều khiển trước đó. Máy tính có nhiệm vụ truyền dữ liệu cho vi điều khiển, còn chương trình firmware chịu trách nhiệm việc ghi dữ liệu đó lên bộ nhớ chương trình, tổ chức sắp xếp một cách hợp lí để chương trình nạp vào có thể hoạt động bình thường, đồng thời cho phép kích hoạt firmware Tiny Bootloader khi vi điều khiển được reset.