Hồi 2001 tôi có làm cái mô hình thí nghiệm điều khiển vị trí (PID) dùng PLC S7-200 cho động cơ AC. Lâu quá rồi nên hiện chỉ tìm thấy hai cái hình này.
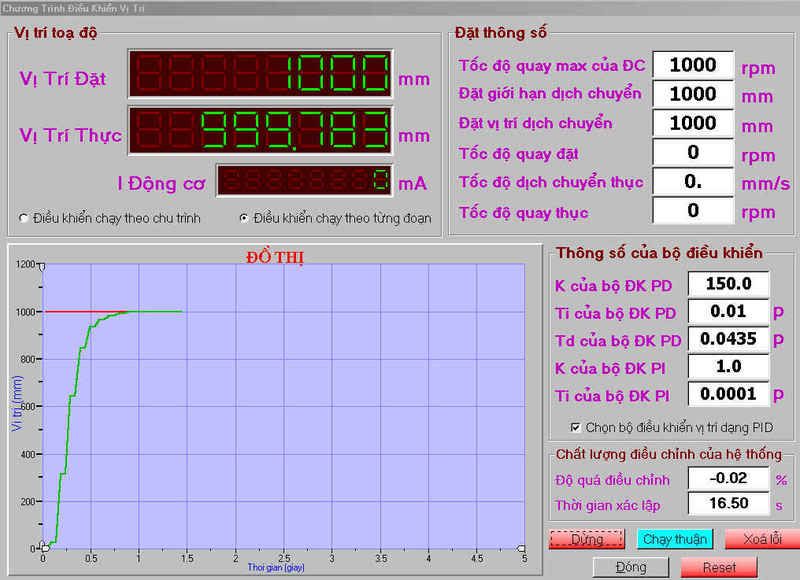
Điều khiển với setpoint là hàm 1(t)
Dùng PID cho vòng điều khiển vị trí
 Điều khiển bám
Điều khiển bám
Dùng PD cho vòng điều khiển vị trí
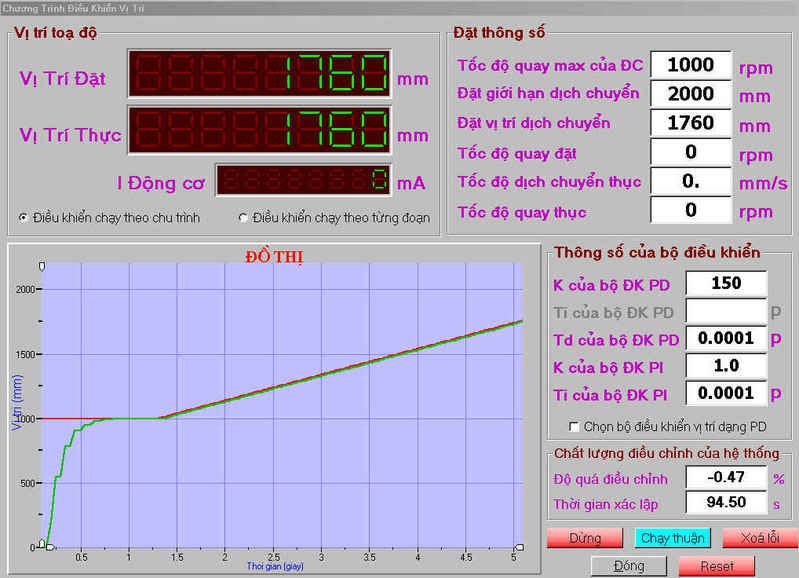
Trong cả hai trường hợp, vòng điều khiển tốc độ cùng PI.