
|
|
Tài trợ cho PIC Vietnam |
||||||||
| Cơ bản về vi điều khiển và PIC Những bài hướng dẫn cơ bản nhất để làm quen với vi điều khiển PIC |
 |
|
|
Ðiều Chỉnh | Xếp Bài |
 20-10-2009, 09:23 AM
20-10-2009, 09:23 AM
|
#1 |
|
Đệ tử 1 túi

Tham gia ngày: Jul 2009
Bài gửi: 17
: |
Động cơ Brushless
Em đang làm đề tài về điều khiển Động cơ không chổi than xoay chiều 3 pha (Brushless Motor). Loại động cơ này đi kèm với bộ điều tốc (ESC). Điểm đặc biệt ở bộ này là chu kì xung vào T phải khoảng 20ms, duty_cycle dao động từ 1-2ms để điều khiển tốc độ động cơ. Nhưng vấn đề của em là chân PWM của con PIC 16F877A mà em đang dùng thì chu kì dựa trên Timer2 chỉ có 8 bit nên chu kì tạo ra ko đủ. Các bác làm ơn giúp em vụ này nhé. Nếu có code C để em tham khảo thì em cám ơn nhiều lắm!
Đây là hình bộ ESC và động cơ: 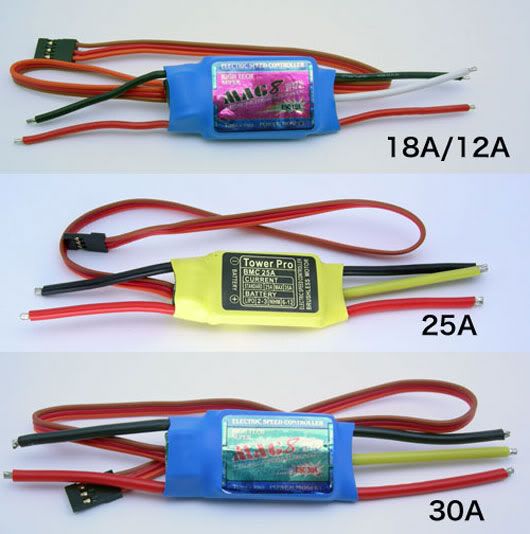  |

|

|
|
20-10-2009, 03:25 PM
|
#2 |
|
Nhập môn đệ tử

Tham gia ngày: Sep 2009
Bài gửi: 1
: |
her, mình cũng đang làm đề tài này, nhưng mình là dùng DS PIC30 điều khiển
|
|
|
|
|
20-10-2009, 08:38 PM
|
#3 |
|
Đệ tử 1 túi
Tham gia ngày: Jul 2009
Bài gửi: 17
: |
Ồ, vậy là cũng có người cùng cảnh ngộ rồi,
 .Nhưng không biết bạn có gặp vấn đề giống mình ko? Bạn đã viết code chưa, nếu có thì cho mình tham khảo với nhé .Nhưng không biết bạn có gặp vấn đề giống mình ko? Bạn đã viết code chưa, nếu có thì cho mình tham khảo với nhé |
|
|
|
|
06-11-2009, 09:09 AM
|
#4 |
|
Nhập môn đệ tử
Tham gia ngày: Sep 2009
Bài gửi: 1
: |
minh cung dang lam ve van de nay nhung dung FPGA de tao code,phuong tien khac nhau nhung duong di chi co 1,nguyen ly dieu khien van the.20ms = 50hz.dieu khien tot
|
|
|
|
|
18-11-2009, 07:39 PM
|
#5 | |
|
Đệ tử 1 túi
Tham gia ngày: Jul 2009
Bài gửi: 17
: |
Trích:
|
|
|
|
|
|
18-11-2009, 11:33 PM
|
#6 |
|
Đệ tử 4 túi
Tham gia ngày: Nov 2008
Bài gửi: 84
: |
bác dùng back emf để detec pha, kiểm tra xem tốc độ có dúng chưa, rồi dưa vào PID để tiếp tục 1 chu trình mới, để điều chính tốc độ motor luôn dúng với tải thay đổi
|
|
|
|
|
20-02-2012, 11:51 AM
|
#7 |
|
Nhập môn đệ tử
Tham gia ngày: May 2010
Bài gửi: 4
: |
các anh có mạch nguyên lí điều khiển của con brushless này không share cho e với!e bây giờ mới đọc về con đông cơ này!
|
|
|
|
|
29-05-2013, 04:48 PM
|
#8 | |
|
Nhập môn đệ tử
Tham gia ngày: May 2013
Bài gửi: 1
: |
Trích:
Em đã tạo xung PWM xuất ra từ ARM cho vào chân s của động cơ nhưng nó vẫn cứ giật giật mà ko chạy Còn khi chạy bằng xung của server text thì trước hết phải setoff max rồi min ok rồi mới điều khiển được xin anh giúp đở, thanks nhìu |
|
|
|
|
|
|
|



 Linear Mode
Linear Mode

