
|
|
Tài trợ cho PIC Vietnam |
||||||||
| Thực hành Bắt đầu làm một robot như thế nào? Mẹo vặt? Kỹ thuật? Công nghệ?... Hãy bắt tay vào việc... |
 |
|
|
Ðiều Chỉnh | Xếp Bài |
 01-07-2006, 12:25 PM
01-07-2006, 12:25 PM
|
#76 | ||
|
Đệ tử 3 túi

Tham gia ngày: Jul 2005
Bài gửi: 47
: |
Trích:
 PWM ở 20kHz ---> chu kì xung là T=50us giả sử băm 8 bít, yêu cầu là độ rộng xung có thể từ (1/256)T đến (256/256)T. Nếu chọn độ rộng bằng 1/256 thì thời gian Ton = 50*1/256=0.1953us Con P521 có sườn lên đã vào khoảng 3us, thế là đủ hiểu chứ. Cậu tính xem ở 10 bít thì có chuyện gì xảy ra Cậu nói: Trích:
Mà còn vấn đề này cần nói luôn, ở cái mạch của cậu thời gian đóng mở của FET cũng không đủ đáp ứng được tần số ấy chứ đừng nói đến con opto. Nguyên nhân là do mạch kích FET không đảm bảo. Tại sao nữa thì đọc sách Điện Tử Công Suất của thầy Doanh nhá! Băm như của cậu thì áp giữa 2 đầu động cơ nó cũng smooth lắm đấy! Cái cách làm thực thế của cậu quá mù mờ! Chỉ nhìn vào con động cơ mà nói thì không phải là thực tế. Nó giống hệt mấy bố làm robocon trường tớ, cũng PWM (1kHz) thấy con động cơ nó cũng tăng giảm tốc độ rồi bảo nhau oki oki thay đổi nội dung bởi: sphinx, 01-07-2006 lúc 12:37 PM. |
||

|

|
|
01-07-2006, 01:14 PM
|
#77 | |
|
PIC Bang chủ

Tham gia ngày: May 2005
Bài gửi: 2,631
:   |
Trích:
Mechatronic cũng vậy, bạn có thể gửi source lên cho mọi người thông qua host của picvietnam (nhớ tắt firewall khi đăng nhập vào host, nếu gặp trục trặc). Xem chữ ký của F để biết cách đăng nhập vào host. Chúc vui
__________________
Công ty TNHH Thương mại và Giao nhận R&P store.hn@rpc.vn - store.hcm@rpc.vn Học PIC như thế nào? |
|
|
|
|
|
01-07-2006, 01:36 PM
|
#78 |
|
PIC Bang chủ
Tham gia ngày: May 2005
Bài gửi: 2,631
: |
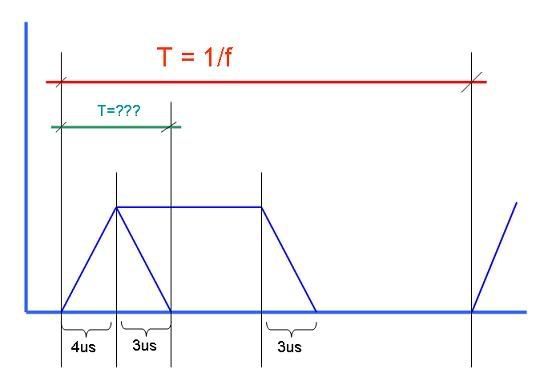 Gửi hình này chắc là em sẽ hiểu ngay thôi. Hôm qua hình như có bạn nào đó cũng hỏi F câu này trên YM. Lúc đó trả lời rằng chu kỳ không thể lớn hơn chu kỳ của tổng thời gian lên và thời gian xuống. Có nghĩa là nếu như các bạn tạo xung với nó, thì xung chỉ có hiệu lực trong vùng đó, không thể nhỏ hơn. Vì vậy, kết quả của bạn nói là 140KHz là đúng. Như vậy, chúng ta chỉ có thể kết luận, xung điều khiển phải nhỏ hơn 140KHz, chứ không có kết luận gì khác được. Nhìn vào hình, nếu như tạo xung liên tục 140KHz, thì chúng ta thấy rằng, không còn khả năng điều động xung PWM nữa. Và các kết luận của các bạn trên kia là đúng, hãy tính ra con số để điều khiển PWM 8 bit, tức là phải chia độ rộng điều khiển ra thành 256 đoạn. Nếu điều khiển ở 140KHz, thì hoàn toàn không thể điều động xung được nữa. Đó chính là kết luận mà mọi người nói đến. Chúc vui. F vẽ xanh đỏ mà quên chú thích, cái xanh đỏ là để F muốn nhắc lại cái phần anh Nam đã nói. Thời gian lên và thời gian xuống, tổng thời gian này là T_xanh, như vậy, nếu mà T_đỏ là chu kỳ điều khiển, thì các bạn sẽ thấy rằng T_xanh << T_đỏ (<< = rất nhỏ hơn), thì mới tốt. Nếu như T_xanh xấp xỉ T_đỏ, thì rõ ràng khả năng điều khiển không đạt hiệu quả, vì cái chúng ta muốn là xung vuông. Khoảng điều khiển khả dĩ như anh Nam nói ở đây là T_đỏ, tức là từ 0% PWM đến 100% PWM. Nhưng một nghịch lý nếu T_xanh quá lớn, trường hợp này là 20% T_đỏ, thì không thể chấp nhận được (đó là trường hợp 20KHz). Để giảm đi khoảng 20 lần, tức là còn khoảng 1%, thì có lẽ chỉ có thể điều khiển được ở 1KHz mà thôi. Hình dung một cách nôm na là PWM sai số 1%. Nếu điều khiển ở 140KHz thì sai số là 100% (vì không điều khiển được gì), nếu điều khiển ở 20KHz thì sai số là 20%, còn nếu điều khiển ở 1KHz thì sai số là khoảng 1% (tất nhiên điều này nói không chính xác lắm, nhưng có thể hình dung nôm na như vậy). Một vấn đề khác nữa sẽ xảy ra ở giai đoạn tốc độ đóng ngắt này, các bạn thấy rằng, nguyên lý mạch cầu H, là đóng mở theo từng cặp. Nếu giờ, tưởng tượng. Chúng ta ra lệnh mở cái cặp Trên_trái và Dưới_phải, đóng cặp Dưới trái, Trên phải của cầu H.  Giả sử, tốc độ của vi điều khiển là 0.2us. Chúng ta thực hiện một lệnh đóng mở liên tiếp nhau. Thì các bạn thấy rõ ràng rằng, trên chưa kịp tắt hẳn vì thời gian xuống của nó là 3us, còn dưới đang đóng lại. Chuyện gì sẽ xảy ra? Có rất nhiều vấn đề cần phải quan tâm ở tốc độ đóng mở này đấy. Chúc vui
__________________
Công ty TNHH Thương mại và Giao nhận R&P store.hn@rpc.vn - store.hcm@rpc.vn Học PIC như thế nào? thay đổi nội dung bởi: falleaf, 01-07-2006 lúc 02:33 PM. |
|
|
|
|
01-07-2006, 01:39 PM
|
#79 |
|
PIC Bang chủ
Tham gia ngày: May 2005
Bài gửi: 2,631
: |
Mọi người giải quyết xong phần mô hình chưa, hiện nay mới có một người làm xong mô hình và đang sửa. Bạn gì đó post mô hình lên, nhưng mà F down phim về chạy không được, chắc định đạng mp4 F không xem được. Bạn có thể chụp lại hình cho mọi người xem.
Chúc vui
__________________
Công ty TNHH Thương mại và Giao nhận R&P store.hn@rpc.vn - store.hcm@rpc.vn Học PIC như thế nào? |
|
|
|
|
01-07-2006, 01:54 PM
|
#80 | |
|
PIC Bang chủ
Tham gia ngày: May 2005
Bài gửi: 2,631
: |
Trích:
Chúc vui
__________________
Công ty TNHH Thương mại và Giao nhận R&P store.hn@rpc.vn - store.hcm@rpc.vn Học PIC như thế nào? |
|
|
|
|
|
01-07-2006, 02:15 PM
|
#81 |
|
PIC Bang chủ
Tham gia ngày: May 2005
Bài gửi: 2,631
: |
Gửi một cái slide tiếp theo về động cơ để các bạn xem thêm về động cơ. Những tài liệu tham khảo không giải thích. Mọi vấn đề sẽ được đề cập trong quá trình làm.
Chúc vui
__________________
Công ty TNHH Thương mại và Giao nhận R&P store.hn@rpc.vn - store.hcm@rpc.vn Học PIC như thế nào? |
|
|
|
|
01-07-2006, 03:15 PM
|
#82 |
|
PIC Bang chủ
Tham gia ngày: May 2005
Bài gửi: 2,631
: |
F sực nhớ ra một ý tưởng như thế này mà quên không nói, mọi người có thể thử làm nhé.
Chúng ta thường bàn những chuyện rất xa xôi, nhưng lại quên một cái điểm rất cơ bản và rất quan trọng, đó là nguồn. 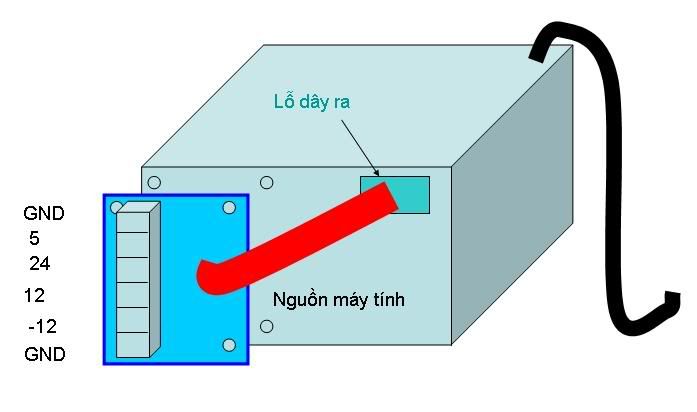 Vậy tại sao các bạn kô thử thiết kế một cái nguồn kiểu như thế này. Thực chất là chỉ thêm một chút thôi, các header, connector. Trên nguồn đã có sẵn 5V và 12V, nguồn công suất khá ổn định cho việc thí nghiệm. Bạn nào thiết kế tốt thì thiết kế luôn cái -12V, và 24V để khoan một cái lỗ và cắm vào cái nguồn, như một cái board để ở ngoài. Board mạch máy tính cũ có rất nhiều, tháo cái đầu cắm luồng không phải khó, mà cũng chẳng cần, các bạn hàn trực tiếp vào cái board luôn. Như vậy, tự nhiên các bạn đã biến cái nguồn máy tính với giá chỉ có 30K thành một cái nguồn thí nghiệm hơi bị ngon lành. Bạn nào giỏi về điện tử, xin thiết kế luôn phần -12V và 24V. Sau này chúng ta sẽ thiết kế nó thành cái chuẩn nguồn thí nghiệm của picvietnam chẳng hạn. Mọi người sau này, chỉ cần đi mua cái nguồn cũ 30K về, gắn cái board của chúng ta lên, lập tức có một cái nguồn thí nghiệm gọn gàng, đủ tiêu chuẩn để thí nghiệm. Vậy nhé, ai thiết kế tốt, picvietnam xin đặt mua cái sản phẩm này để khích lệ tinh thần làm việc của các bạn. Chỉ cần làm những cái rất đơn giản mà hữu ích cho mọi người là được. Chúc vui.
__________________
Công ty TNHH Thương mại và Giao nhận R&P store.hn@rpc.vn - store.hcm@rpc.vn Học PIC như thế nào? |
|
|
|
|
01-07-2006, 03:23 PM
|
#83 |
|
Đệ tử 3 túi
Tham gia ngày: Jul 2005
Bài gửi: 47
: |
Hai tài liệu rất quan trọng cần đọc để có kiến thức tốt về PWM và thiết kế mạch cầu H là:
Lý thuyết PWM: Cơ Sở Điều Khiển Tự Động Truyền Động Điện Trần Thọ - Võ Quang Lạp Sách dịch từ tài liệu của Đại Học Công Nghiệp Thượng Hải. Đọc nó để biết đến nơi đến chốn thế nào là PWM (đọc từ trang 245) Lý thuyết kích (mồi) MOSFET: Điện Tử Công Suất - Lý Thuyết - Thiết Kế - Ứng Dụng Lê Văn Doanh - Nguyễn Thế Công - Trần Văn Thịnh Đọc nó để biết mạch mồi MOSFET nào là tốt! Bìa sách:   thay đổi nội dung bởi: sphinx, 01-07-2006 lúc 03:35 PM. |
|
|
|
|
01-07-2006, 04:29 PM
|
#84 |
|
Đệ tử 6 túi

Tham gia ngày: Jun 2005
Bài gửi: 141
: |
Mô hình của mình vì mình phải đem đi gia công cơ khí rồi mạ kẽm nên làm hơi lâu. Khoảng giữa tuần tới mới xong.
Đoạn film mà falleaf download về phải dùng Quicktime mới xem được. Trong lúc các bạn đang làm mô hinh có lẽ chúng ta nên nói về phần lý thuyết nhỉ. |
|
|
|
|
02-07-2006, 01:28 PM
|
#85 | |
|
Đệ tử 3 túi
Tham gia ngày: Jul 2005
Bài gửi: 47
: |
Trích:
. Khó khăn nhất là kiếm được cái nguồn 24V (hoặc hơn) có công suất đủ lớn (tầm 100W) để chạy con động cơ! Nguồn máy tính lo được cái vụ 12V nhưng 24V thì chịu!Nếu sử dụng biến thế với mạch cầu thì cái biến thế nó sẽ to đùng  và tất nhiên nếu không là nguồn ổn áp thì điện áp vào sẽ phụ thuộc vào điện lưới. Điện lưới không ổn định thì toi! và tất nhiên nếu không là nguồn ổn áp thì điện áp vào sẽ phụ thuộc vào điện lưới. Điện lưới không ổn định thì toi!Ngay trước lười làm nguồn thế là dùng luôn 2 em ắcquy |
|
|
|
|
|
02-07-2006, 08:02 PM
|
#86 | |
|
PIC Bang chủ
Tham gia ngày: May 2005
Bài gửi: 2,631
: |
Trích:
Chúc vui
__________________
Công ty TNHH Thương mại và Giao nhận R&P store.hn@rpc.vn - store.hcm@rpc.vn Học PIC như thế nào? |
|
|
|
|
|
02-07-2006, 08:04 PM
|
#87 |
|
PIC Bang chủ
Tham gia ngày: May 2005
Bài gửi: 2,631
: |
Có bạn nào làm xong phần tính toán moment quán tính của tải chưa nhỉ? Tính xong thì gửi lên cho mọi người xem với nhé.
Chúc vui
__________________
Công ty TNHH Thương mại và Giao nhận R&P store.hn@rpc.vn - store.hcm@rpc.vn Học PIC như thế nào? |
|
|
|
|
04-07-2006, 10:28 AM
|
#88 |
|
Đệ tử 3 túi
Tham gia ngày: Jun 2006
Bài gửi: 53
: |
Chào mọi người, từ đề nghị của anh F tớ nghĩ ra một cách để tạo nên nguồn có điện áp cao từ bộ nguồn máy tính 12V bằng cách dùng hai mạch opamp khuếch đại đảo pha nối tiếp nhau, tuy nhiên đây mới là tính toán trên lí thuyết thôi còn thực tế tớ chưa làm thử bao giờ
 .Mời mọi người cùng cho ý kiến để ta có được bộ nguồn thí nghiệm hiệu quả nhé. .Mời mọi người cùng cho ý kiến để ta có được bộ nguồn thí nghiệm hiệu quả nhé. |
|
|
|
|
04-07-2006, 10:31 AM
|
#89 |
|
Đệ tử 3 túi
Tham gia ngày: Jun 2006
Bài gửi: 53
: |
à quên, mình cũng chưa có kinh nghiệm thực tế nhiều nên không biết chọn các giá trị điện trở R1, R2, R3, R4 và opamp như thế cho phù hợp, bạn nào có kinh nghiệm chỉ giúp nhe
|
|
|
|
|
04-07-2006, 01:24 PM
|
#90 |
|
Đệ tử 4 túi
Tham gia ngày: May 2005
Bài gửi: 83
: |
bạn nào có nhu cầu sử dụng các Driver motor dạng IC như LMD18200/LMD18245/L293 thì liên hệ mình nha , ngoài ra mình còn dư vài cái động cơ có encoder 432 xung .Bạn nào cần mình để lại cho vì ko dùng .
 |
|
|
|
|
|
|


 falleaf
falleaf )
) Linear Mode
Linear Mode

