
|
|
Tài trợ cho PIC Vietnam |
||||||||
| Công nghệ robot Tất cả các vấn đề về robot di động, tay máy, haptics.... |
 |
|
|
Ðiều Chỉnh | Xếp Bài |
 11-04-2006, 04:33 PM
11-04-2006, 04:33 PM
|
#1 |
|
PIC Bang chủ

Tham gia ngày: May 2005
Bài gửi: 2,631
:   |
Robot di động
Hôm nay F phổ biến một phần trong luận văn cũ của F về bài toán UMBmark của Borenstein. Thực ra đây chỉ là phần trình bày lại cho gọn gàng hơn, và tập trung hơn, và cụ thể hơn cho bài toán robot của F.
Phần chương trình thì viết rất đơn giản, và chưa hoàn thiện, đến nay vẫn vứt ở đó, vì vậy không phổ biến. Các bạn có thể tìm bài báo gốc và nghiên cứu lại vấn đề thực nghiệm này để áp dụng cho các robot di động, và ứng dụng vào các mô hình động học khác nhau của robot di động. Chúc vui
__________________
Công ty TNHH Thương mại và Giao nhận R&P store.hn@rpc.vn - store.hcm@rpc.vn Học PIC như thế nào? |

|

|
|
11-04-2006, 09:10 PM
|
#2 |
|
PIC Bang chủ
Tham gia ngày: May 2005
Bài gửi: 2,631
: |
My favourite
http://www.engin.umich.edu/research/mrl/00MoRob.html
Trang này không còn được cập nhật từ năm 2001 http://www-personal.umich.edu/~johannb/ Còn đây là trang mới nhưng cũng đã ngừng cập nhật rất lâu rồi. Vào đây, có thể nói các bạn sẽ biết được những bước "cơ bản" để làm về robot di động. Chúng ta có thể cùng nghiên cứu về phần này. Chúc vui.
__________________
Công ty TNHH Thương mại và Giao nhận R&P store.hn@rpc.vn - store.hcm@rpc.vn Học PIC như thế nào? |
|
|
|
|
21-06-2006, 12:24 AM
|
#3 |
|
PIC Bang chủ
Tham gia ngày: May 2005
Bài gửi: 2,631
: |
Giới thiệu với các bạn một tài liệu về robot di động rất hay, F nghĩ bạn nào thích về robot di động, mộng mơ một tí, nên đọc cuốn sách này, nó rất cần cho các bạn để trang bị những ý tưởng ban đầu về robot di động.
Nói vậy, nhưng thực ra, gần như nó tổng hợp khá đầy đủ và chi tiết các vấn đề về robot di động, đặc biệt bài toán trên mặt phẳng, 2 bậc và 3 bậc tự do, loại di chuyển bằng chân... http://doanhiep.com/~ulsan/Introduct...ile_Robots.pdf Chúc vui
__________________
Công ty TNHH Thương mại và Giao nhận R&P store.hn@rpc.vn - store.hcm@rpc.vn Học PIC như thế nào? |
|
|
|
|
13-11-2006, 05:19 AM
|
#4 |
|
Đệ tử 1 túi
Tham gia ngày: Nov 2005
Bài gửi: 23
: |
To F:
Hôm nọ vào site tailieuvietnam.net của F thấy ý tưởng rất hay. Tuy nhiên, có một điều này xin chia sẻ cùng F là: nhưng cuốn sách, bài báo, hội nghị ICRA chẳng hạn mà F định dich hoặc công bố thì đã bao giờ F nghĩ đến vấn đề copyright chưa. Việc dùng e-book của những sách dã được đăng ký là đã vi phạm, việc phân tán nó còn vi phạm năng hơn. Với các bài báo, tài liệu khác cũng vậy. Ví du, cuốn Introduction to Autonomous Mobile Robots của Roland Siegward thì mình đã đọc và biết chắc chắn nó được xuất bản có copyright  ) )Truyên tay nhau đọc là một chuyện,và có thề vì F học trong trương DH của Korea nên có điều kiện download nó để sử dụng, nhưng việc F phân tán nó một cách rộng rãi và công khai hoặc dịch nó thì chắc không có trong luật của trường, của book publisher phải không? Suy nghĩ cá nhân tôi, để bắt kịp với thế giới thì phải theo luật của TG trước đã. Xin được chỉ giáo nếu có hiểu biết chưa đầy đủ P/S: Anyway, nếu F có dụ ICRA07 ơ Rome thì liên hệ nhé, rất vui được gặp. Ở Korea thì mình có nghe nói đến anh Đông ở KIST cũng làm về robotics khá lâu, tiếc vừa rồi ở IROS06 anh Đông cũng có bài nhưng không di present nen khong có điều kiện gặp. Odense rất mong muốn đươc gặp và tạo được một cộng đông làm nghiên cứu robotics thật sự của VN. |
|
|
|
|
14-11-2006, 04:07 PM
|
#5 |
|
PIC Bang chủ
Tham gia ngày: May 2005
Bài gửi: 2,631
: |
Không có ý định dịch tài liệu của ICRA, chắc bạn hiểu lầm, mình chỉ cung cấp báo ICRA mà thôi.
Cái của mình không biết có kịp ICRA07 hay không, nhưng chắc phải đợi đến ICRA08 vì nó liên quan khá nhiều tới vấn đề lý luận con người. Đến bây giờ đường hướng này mình chỉ thấy có 2 lab trên thế giới làm, một ở Pháp, lab mình làm trước đây, và một ở Mỹ là của Standford. Thế giới chưa tin tưởng hướng đi này, và đang có nhiều băn khoăn về nó. Vì vậy cái của mình làm không mấy hứa hẹn báo chí nhiều đâu. Nhóm ICA ở Pháp thì đơn giản nói với mình rằng, chúng ta cứ làm, và thời gian sẽ chứng minh . Và thực sự thì họ đã thành công, nhưng chẳng ai tìm được bài báo nào của họ cả!! Hầu hết báo chí hội nghị của họ chỉ nói chơi chơi, các lý luận kiểu thế nào là thực, thế nào là không thực... Cho tới giờ vẫn chưa thấy bài mới... Trong khi nội bộ thì mình biết họ làm rất nhiều, đang chờ setup xong hệ thống cơ khí ở đây, khi nào setup xong thì sẽ chụp hình cho anh em xem. Có một đặc điểm F nghiên cứu khoa học rất vui, sẽ cùng VN nghiên cứu!! Chúc vui
__________________
Công ty TNHH Thương mại và Giao nhận R&P store.hn@rpc.vn - store.hcm@rpc.vn Học PIC như thế nào? |
|
|
|
|
19-11-2006, 10:02 PM
|
#6 |
|
PIC Bang chủ
Tham gia ngày: May 2005
Bài gửi: 2,631
: |
Robot di động, một bài toán đố
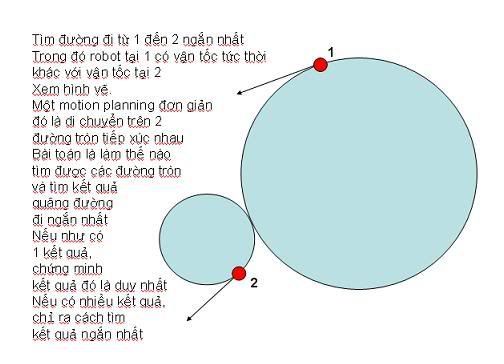 Đây là một bài toán vui để khai trương box này. Bây giờ chúng ta có 2 vị trí robot 1 và 2. Cần phải đi từ 1 đến 2, sao cho vector vận tốc như hình vẽ. Bài toán đặt ra là, tìm motion planning có dạng hai đường tròn tiếp xúc nhau, đi từ 1 đến 2, để robot chuyển động một cách liên tục. Đây là một bài toán rất đơn giản. Nếu tìm được 1 nghiệm, thì phải chứng minh nghiệm đó là duy nhất (2 tâm và 2 bán kính là duy nhất). Nếu tìm được nhiều nghiệm, đặt ra thêm một bài toán nữa, đó là tìm đường đi ngắn nhất. Nếu như có nhiều nghiệm có đường đi ngắn nhất nữa, thì đặt thêm bài toán tìm đường đi có độ biến thiên vận tốc bánh xe (robot mô hình NEWT hai bánh xe chủ động) nhỏ nhất. Đây là một bài F đố các thành viên Robotics nhé..  Nếu đưa bài này cho học sinh lớp 9 thì chắc sẽ giải nhanh lắm, không biết các thành viên robotics thì sẽ thế nào? khà khà... Chúc vui
__________________
Công ty TNHH Thương mại và Giao nhận R&P store.hn@rpc.vn - store.hcm@rpc.vn Học PIC như thế nào? |
|
|
|
|
18-01-2008, 02:25 AM
|
#7 |
|
Nhập môn đệ tử
Tham gia ngày: Jan 2008
Bài gửi: 2
: |
các pác ơi! làm ơn chỉ giùm em cách down với.chẳng hiểu sao e down về toàn attachment. các pác làm ơn mail vào hòm thw này giúp em với: trunghieu40ma@yahoo.com . cảm ơn các pác rất nhiều
|
|
|
|
|
20-01-2008, 04:06 PM
|
#8 | |
|
Nhập môn đệ tử
Tham gia ngày: Dec 2006
Bài gửi: 7
: |
Trích:
Thanx |
|
|
|
|
|
20-04-2008, 10:43 PM
|
#9 |
|
Nhập môn đệ tử
Tham gia ngày: Apr 2008
Bài gửi: 1
: |
Anh Falleaf xem lại cái link http://doanhiep.com/~ulsan/Introduct...ile_Robots.pdf
giùm em.Em down ko dc.Em đang làm đề tài tốt nghiệp robot dò đường dùng cảm biến siêu âm. Anh Falleaf có thể tư vấn giúp em nên dùng chú nào để dễ lập trình và dễ mua. Sẵn tiện chỉ em chỗ đặt mua.Em cám ơn anh nhiều!!! |
|
|
|
|
|
|
 Similar Threads
Similar Threads
|
||||
| Ðề tài | Người gửi | Chuyên mục | Trả lời | Bài mới |
| Robot đo lường( Measurement Robot) | son_um | Công nghệ robot | 20 | 29-02-2012 10:47 PM |


 falleaf
falleaf
 Linear Mode
Linear Mode

