
|
|
Tài trợ cho PIC Vietnam |
||||||||
| Luận văn tốt nghiệp Nếu bạn thắc mắc vì sao chúng tôi muốn phổ biến các luận văn tốt nghiệp? Xin xem tại đây |
 |
|
|
Ðiều Chỉnh | Xếp Bài |
 22-07-2005, 12:45 AM
22-07-2005, 12:45 AM
|
#1 |
|
PIC Bang chủ

Tham gia ngày: May 2005
Bài gửi: 2,631
:   |
Mr. Scooter
Các bạn cho một vài lời bình luận về những hình ảnh này nhé. Tôi thì thấy nó rất hấp dẫn, không có gì để bàn cãi thêm.
Hiện nay tác giả của đề tài đang bận một số việc, tôi thay mặt tác giả gửi các hình ảnh này cho các bạn xem. Lần lượt, chúng tôi sẽ giới thiệu các mảng đề tài lớn khác đến với các bạn. Mỗi đề tài, chúng ta sẽ thảo luận cùng với tác giả của đề tài. Trước mắt, chúng tôi dự tính cung cấp thông tin về đề tài scooter này, sau đó sẽ là đề tài wallfollowing và self localization mobile robot. Chúng tôi kêu gọi các bạn đã thực hiện các đề tài nghiên cứu, cùng cung cấp các đề tài, và đứng ra bảo vệ chính đề tài của mình trước hội đồng anh em picvietnam. Điều này sẽ giúp cho các tác giả khẳng định rõ hơn giá trị của đề tài mình làm, và giúp cho các học sinh, sinh viên ham thích robotics, vi điều khiển, có điều kiện tìm hiểu thêm.  Đây là cái gầm xe  Đây là khung xe 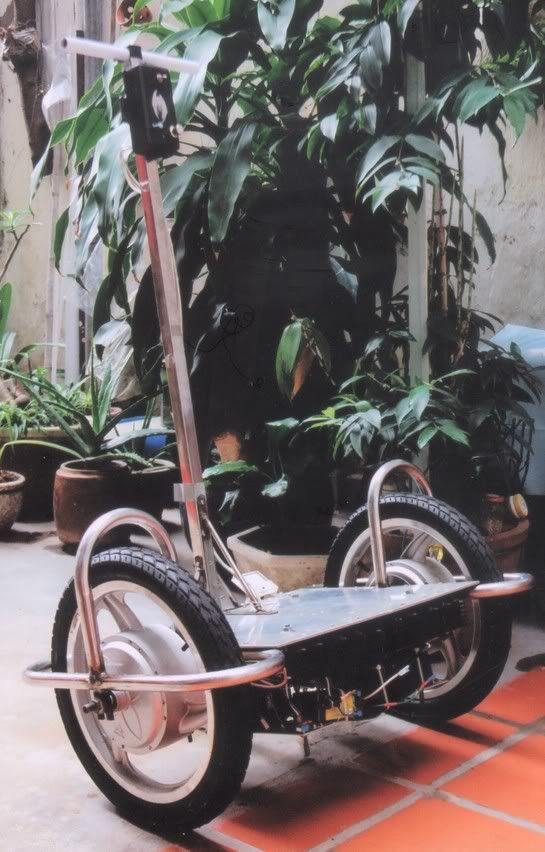 Hình toàn cảnh của xe. 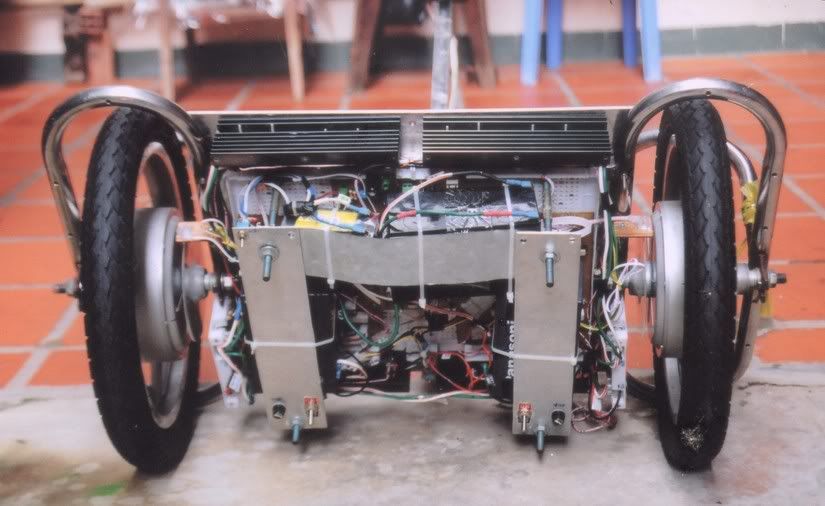 Hình gầm xe Chúng tôi sẽ cung cấp thông tin dần dần, vì mặc dù nhà tôi ADSL nhưng thiệt tình mỗi cái hình nó upload lên nó tự nén lâu quá... mà không có thời gian ngồi sửa. Anh em thông cảm, mỗi ngày đưa lên một tí vậy
__________________
Công ty TNHH Thương mại và Giao nhận R&P store.hn@rpc.vn - store.hcm@rpc.vn Học PIC như thế nào? thay đổi nội dung bởi: falleaf, 22-07-2005 lúc 05:59 AM. |

|

|
|
22-07-2005, 01:03 AM
|
#2 |
|
PIC Bang chủ
Tham gia ngày: May 2005
Bài gửi: 2,631
: |
Bạn có thể download phiên bản powerpoint của luận văn tại đây
__________________
Công ty TNHH Thương mại và Giao nhận R&P store.hn@rpc.vn - store.hcm@rpc.vn Học PIC như thế nào? |
|
|
|
|
22-07-2005, 06:00 AM
|
#3 |
|
PIC Bang chủ
Tham gia ngày: May 2005
Bài gửi: 2,631
: |
  Động cơ đây  Tác giả đây, và cái xe đang chạy, tự thăng bằng đấy.
__________________
Công ty TNHH Thương mại và Giao nhận R&P store.hn@rpc.vn - store.hcm@rpc.vn Học PIC như thế nào? |
|
|
|
|
22-07-2005, 06:53 AM
|
#4 |
|
PIC Bang chủ
Tham gia ngày: May 2005
Bài gửi: 2,631
: |
Giới thiệu tác giả
Cấp 2, bé quá không tính
Cấp 3, LHP, chủ nhiệm CLB Ong Học Trò, chuyên làm ba cái trò dở hơi như con dơi là điện tử... học và hướng dẫn bọn phổ thông cùng lứa. Trong trường có một anh thầy khoái trò này, thế là câu lạc bộ phát triển khá vui. Nếu tôi nhớ không lầm, thì cu cậu còn được đi Úc thi xe năng lượng mặt trời nữa. Đại học, PFIEV2000, thi phân ngành được xếp trong những thằng cao nhất ngành, đi chơi Pháp một chuyến, và ngành của chàng là CDT. Bây giờ thì đấy, vừa bảo vệ luận văn, sắp sang Pháp học tiếp. Hiện nay đang làm lập trình PIC cho BKC. Tôi nghĩ rằng đây là một kết quả khả dĩ, cho một sự cố gắng làm việc. Rất nhiều điều tôi đã học được từ thằng đệ này. Mặc dù sau này tôi có hướng dẫn một chút về PIC cho cậu này, nhưng chính hắn lại là người nói với tôi về con PIC đầu tiên vì lúc đó hắn rất hay nghịch đủ thứ. Tạm thời vậy nhé. Anh có nói sai gì thì mày lên hiệu đính dùm anh nhé, ami (nick của Mai Tuấn Đạt tại picvietnam). Chờ các câu hỏi của các bạn.
__________________
Công ty TNHH Thương mại và Giao nhận R&P store.hn@rpc.vn - store.hcm@rpc.vn Học PIC như thế nào? |
|
|
|
|
25-07-2005, 06:11 PM
|
#5 |
|
PIC Bang chủ
Tham gia ngày: May 2005
Bài gửi: 2,631
: |
Các bạn có thể download luận văn của ami (mr. Scooter) tại đây.
Tài liệu tham khảo, các bạn có thể download tại đây. Aux Prof. Trevor Balckwell, Anderson et aux professeurs du projet JOE , c'est le rapport de fin d'etude de M.MAI, préferé de votre site de l'Internet: http://www.picvietnam.com/download/resume.pdf Chúc vui. PS> Chúng tôi sẽ cung cấp tiếp một số đoạn phim chạy thử Scooter sau đó.
__________________
Công ty TNHH Thương mại và Giao nhận R&P store.hn@rpc.vn - store.hcm@rpc.vn Học PIC như thế nào? |
|
|
|
|
15-08-2005, 11:53 AM
|
#6 |
|
Đệ tử 1 túi
Tham gia ngày: Aug 2005
Bài gửi: 14
: |
Bác falleaf ui, em muốn liên hệ với anh Đạt thì làm sao?(nhờ đại ca chỉ giáo chút) Bác có thể cho em SDT của anh ấy được không? Hoặc là địa chỉ mail mà anh ấy hay dùng cũng được. Thanks bác.
|
|
|
|
|
15-08-2005, 08:04 PM
|
#7 |
|
PIC Bang chủ
Tham gia ngày: May 2005
Bài gửi: 2,631
: |
Đề tài này được mở ra để các bạn trực tiếp trao đổi trên này, chúng tôi không hỗ trợ trao đổi riêng.
Nếu cần gì, bạn cứ trao đổi trên diễn đàn, bạn Đạt sẽ trả lời bạn. Chúc vui.
__________________
Công ty TNHH Thương mại và Giao nhận R&P store.hn@rpc.vn - store.hcm@rpc.vn Học PIC như thế nào? |
|
|
|
|
12-10-2005, 10:02 AM
|
#8 |
|
Nhập môn đệ tử

Tham gia ngày: Oct 2005
Bài gửi: 4
: |
Trước đây tôi có định nghiên cứu, chế tạo xe chạy điện nhưng tìm không ra động cơ trên thị trường. Bây giờ nhìn thấy ở đây thích thật. Không biết có ai biết tại VN ở đâu bán loại động cơ như trên hình, hoặc loại động cơ như của xe đạp điện Delta, xin vui lòng chỉ giúp.
|
|
|
|
|
12-10-2005, 10:26 AM
|
#9 |
|
PIC Bang chủ
Tham gia ngày: May 2005
Bài gửi: 2,631
: |
Có một công ty xe đạp điện ở trong hẻm đường Đặng Văn Ngữ TPHCM. Các bánh xe này được mua ở đó. Về địa chỉ liên lạc cụ thể, có thể ami còn giữ, bạn ấy sẽ trả lời sớm cho các bạn.
Chúc vui.
__________________
Công ty TNHH Thương mại và Giao nhận R&P store.hn@rpc.vn - store.hcm@rpc.vn Học PIC như thế nào? |
|
|
|
|
01-12-2005, 05:27 PM
|
#10 |
|
Đệ tử 1 túi
Tham gia ngày: Nov 2005
Bài gửi: 12
: |
Cho mình hỏi cảm biến gia tốc và cảm biến góc bạn mua ở đâu vậy có thể gởi cho mình địa chỉ không?
|
|
|
|
|
01-12-2005, 09:26 PM
|
#11 |
|
PIC Bang chủ
Tham gia ngày: May 2005
Bài gửi: 2,631
: |
Mua ở nước ngoài, không phải mua trong nước nên không biết chỗ mua trong nước.
Nếu bạn muốn mua cảm biến, bạn có thể liên hệ vetecom để nhờ mua. Chúc vui.
__________________
Công ty TNHH Thương mại và Giao nhận R&P store.hn@rpc.vn - store.hcm@rpc.vn Học PIC như thế nào? |
|
|
|
|
05-12-2005, 10:29 AM
|
#12 |
|
Đệ tử 2 túi
Tham gia ngày: Jun 2005
Bài gửi: 27
: |
Bác ami ơi , em đang kiếm cái tài liệu về Visual Nastran á ,bác có post lên cho bọn em ngâm cứu với .Ah ,bác có về Matlab (liên quan đến Nastran lun nha ) .
|
|
|
|
|
07-12-2005, 04:09 PM
|
#13 |
|
Đệ tử 1 túi
Tham gia ngày: Nov 2005
Bài gửi: 12
: |
MTD ơi sau khi mô phỏng bạn làm thế nào để chuyển sang ngôn ngữ dùng để nạp cho pic bạn có thể nói rỏ hơn được không?
|
|
|
|
|
08-12-2005, 08:11 PM
|
#14 |
|
Đệ tử 2 túi
Tham gia ngày: Jun 2005
Bài gửi: 27
: |
Bạn thaychua muốn nói đến cái nào vậy ? mô phỏng vi xử lý hay là mô phỏng chuyển động vì cái mình nói là mô phỏng chuyển động .Ah ,anh ami ơi ,anh chỉ em cái , em connect cái part bên solid work sang visual nastran thì nó mất tiêu đâu hết màu luôn ,mà trong film demo của nó em thấy nó chuyển qua vẫn có màu mà (nó chuyển cái asm <= ko bit có khác nhau ko ta ) .Bác trả lời sớm dùm em được hun ,em đang cần gấp .
|
|
|
|
|
08-12-2005, 11:45 PM
|
#15 | |
|
Đệ tử 9 túi

Tham gia ngày: Jul 2005
Nơi Cư Ngụ: Grenoble - FRANCE
Bài gửi: 38
: |
Trích:
Ve mô phỏng thì mình kết hợp giữa Matlab va vnNastran, tức có nghĩa là mình mô phỏng cả 2. Matlab SIMULINK đóng vai trò mô phỏng sự tính toán và điều khiển của MCU, con vnNastran tínểh toán và đưa ra các mô phỏng và tính chất chuyển động vật lý của hệ. ve màu sắc thì từ Solid WOrk sang vn Natran mất là hiển nhiên. KHi chuyển các part vào VNastran, ban chọn từng part rồi chọn Properties để chỉnh màu, loại vật liệu, độ ma sát ... Xin chào, chúc thành công
__________________
 Không béo bề ngang thì cũng bổ bề dọc Không béo bề ngang thì cũng bổ bề dọcKhông bổ cho ruột non thì cũng bổ ruột ... |
|
|
|
|
|
|
|
 Similar Threads
Similar Threads
|
||||
| Ðề tài | Người gửi | Chuyên mục | Trả lời | Bài mới |
| Robot Scooter - Con lắc ngược | falleaf | PIC - Thiết kế và Ứng dụng | 8 | 04-08-2005 10:16 PM |


 falleaf
falleaf ami
ami Linear Mode
Linear Mode

