
|
|
Tài trợ cho PIC Vietnam |
||||||||
| Thực hành Bắt đầu làm một robot như thế nào? Mẹo vặt? Kỹ thuật? Công nghệ?... Hãy bắt tay vào việc... |
 |
|
|
Ðiều Chỉnh | Xếp Bài |
 21-03-2009, 09:48 AM
21-03-2009, 09:48 AM
|
#436 |
|
Nhập môn đệ tử
Tham gia ngày: Mar 2006
Bài gửi: 10
: |
Chào mọi người không biết luông này còn hoạt động không nhỉ,em đang rất cần bộ thông số của động cơ Nisca nhãn hiệu NF5475E . Em tìm trên trang web của Nisca nhưng thông số nó cho chỉ có momen xoắn , hệ số mômen km,chứ chẳng thấy J,b,La,Ra đâu cả . Bác nào có cho em xin với
Thanks! |

|

|
|
26-03-2009, 10:51 AM
|
#437 |
|
Nhập môn đệ tử
Tham gia ngày: Mar 2006
Bài gửi: 10
: |
Luồng này kết thúc rùi sao các bác? Một kết thúc rất là "vietnam" mình
 : Lúc mới bắt đầu các bác giới thiệu đề tài rất hoành tráng bao nhiêu dự định,vơí những mục đích và tham vong lớn lao vậy mà kết thúc chỉ thế này thôi sao không có nổi một cái báo cáo thậm chí tối thiểu là cái kết luận đề tài xem là đã làm đc những gì ,mức độ thành công của đề tài đến đâu(hay các bác làm được thì giữ lại làm bí kíp cho mình luôn hi...:d) . Em đã kiểm tra lại một lượt từ đầu tới cuối luồng thì thấy có mỗi nhóm bác bluepine là đi gần tới cùng (phải chăng vì cái động cơ của bác đó có datasheet nên có được đủ các thông số?) em nói vậy vì thấy với các loại động cơ của các nhóm khác không có đây đủ thông số thì đều không có kết quả cuối cùng (chẳng hạn như nhóm của bác tinhthanthep em thấy tắt ngóm từ phần làm pid...). Em nghe nói phương pháp Ziegler – Nichols 2 không cần đến hàm truyền vẫn tính được các hệ số pid (trích nội dung:Thay bộ điều khiển PID trong hệ kín bằng bộ khuếch đại. Sau đó tăng hệ số khuếch đại tới giá trị tới hạn kth để hệ kín ở chế độ biên giới ổn định, tức là có dạng dao động điều hòa . Xác định chu kỳ Tth của dao động sau do suy ra các hệ số kp,ki,kd) không biết phương pháp này thế nào nhỉ . các bác cao thủ còn tâm huyết với đề tài này xin chỉ giáo cho em với : Lúc mới bắt đầu các bác giới thiệu đề tài rất hoành tráng bao nhiêu dự định,vơí những mục đích và tham vong lớn lao vậy mà kết thúc chỉ thế này thôi sao không có nổi một cái báo cáo thậm chí tối thiểu là cái kết luận đề tài xem là đã làm đc những gì ,mức độ thành công của đề tài đến đâu(hay các bác làm được thì giữ lại làm bí kíp cho mình luôn hi...:d) . Em đã kiểm tra lại một lượt từ đầu tới cuối luồng thì thấy có mỗi nhóm bác bluepine là đi gần tới cùng (phải chăng vì cái động cơ của bác đó có datasheet nên có được đủ các thông số?) em nói vậy vì thấy với các loại động cơ của các nhóm khác không có đây đủ thông số thì đều không có kết quả cuối cùng (chẳng hạn như nhóm của bác tinhthanthep em thấy tắt ngóm từ phần làm pid...). Em nghe nói phương pháp Ziegler – Nichols 2 không cần đến hàm truyền vẫn tính được các hệ số pid (trích nội dung:Thay bộ điều khiển PID trong hệ kín bằng bộ khuếch đại. Sau đó tăng hệ số khuếch đại tới giá trị tới hạn kth để hệ kín ở chế độ biên giới ổn định, tức là có dạng dao động điều hòa . Xác định chu kỳ Tth của dao động sau do suy ra các hệ số kp,ki,kd) không biết phương pháp này thế nào nhỉ . các bác cao thủ còn tâm huyết với đề tài này xin chỉ giáo cho em vớithanks |
|
|
|
|
31-03-2009, 02:38 AM
|
#438 |
|
Đệ tử 1 túi
Tham gia ngày: Oct 2006
Bài gửi: 19
: |
Cho em hỏi: biểu thức toán học của PID là
Code:
U(t) = Kp*e(t) + Ki*tich_phan(e(t)) + Kd*vi_phan(e(t)) ; (1) Code:
duty = duty + Kp*e2 + Ki*e_sum + Kd*e_del; (2) Em có làm thử theo công thức thứ (2) mà mới để Kp = 1; Ki = Kd = 0; mà động cơ đã vọt lố, giao động mạnh rồi, phải dùng tay ghì bánh xe lại (tải rất lớn) thì động cơ mới đỡ giao động ??? |
|
|
|
|
31-03-2009, 07:16 AM
|
#439 |
|
Trưởng lão PIC bang

Tham gia ngày: Dec 2005
Bài gửi: 315
: |
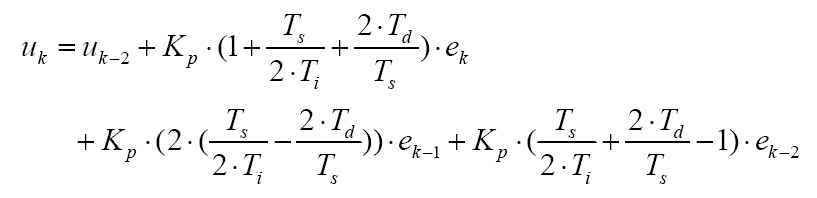 Trên đây là công thức tính PID (cấu trúc song song) rời rạc đã được đề cập đến trong rất nhiều sách. Kp, Ti, Td: thông số của PID Ts: chu kỳ trích mẫu <code> // sense: đọc dữ liệu từ sensor ek = ref – pv; // pv = present value // calculate & anti-windup limits uk = theo công thức; if ( uk > ukmax ) uk = ukmax; else if ( uk < ukmin ) uk = ukmin; // update biến trạng thái ek-2 = ek-1; ek-1 = ek; uk-2 = uk-1; uk-1 = uk; // actuate: ghi dữ liệu ra actuator outPortUk.data()->Set(uk); // ví dụ 1 lệnh gửi dữ liệu ra output port </code> Chú ý tuần tự thực hiện nên là: sense(), calculate(), update(), actuate(). Astrom and Wittenmark có đề xuất là “writing first”, khi đó tuần tự thực hiện sẽ là actuate(), sense(), calculate(), update(). Tuy nhiên trong vấn đề này mỗi người có một quan điểm khác nhau.
__________________
Sống là động nhưng lòng luôn bất động, Sống là thương nhưng lòng chẳng vấn vương, Sống yên vui danh lợi vẫn coi thường, Tâm bất biến giữa dòng đời vạn biến. Chú ý: đề nghị các thành viên đọc luồng dưới đây trước khi post bài: http://www.picvietnam.com/forum//showthread.php?t=1263 thay đổi nội dung bởi: Mecha, 31-03-2009 lúc 07:21 AM. |
|
|
|
|
31-03-2009, 10:36 AM
|
#440 |
|
Đệ tử 4 túi

Tham gia ngày: Jul 2007
Bài gửi: 66
: |
Cái PID này người ta đã làm từ rất rất lâu rồi,cái thread này cũng đã tạo ra từ rất lâu mà đến nay cũng chỉ kết thúc ở công thức PID,thật đáng thất vọng,
có điều khi làm lý thuyết là 1 chuyện,thực nghiệm là 1 chuyện,mô phỏng chạy rất ok nhưng thực nghiệm thì lại ko có thông số động cơ?vậy là cuối cùng cũng phải mò mấy hệ số KP,Ki,Kd, |
|
|
|
|
31-03-2009, 02:48 PM
|
#441 |
|
Đệ tử 1 túi

Tham gia ngày: Sep 2008
Bài gửi: 20
: |
Em đã làm xong bộ điếu khiển dc servo chạy rất ok , đã kết nối với bộ điều khiển cnc tốt có một đoạn phim nhưng không biết làm thế nào pót lên để các bác góp ý
|
|
|
|
|
31-03-2009, 04:44 PM
|
#442 |
|
Đệ tử 4 túi
Tham gia ngày: Nov 2008
Bài gửi: 84
: |
gởi lên youtube roi post link bác ah
b/r |
|
|
|
|
31-03-2009, 05:23 PM
|
#443 | |
|
Trưởng lão PIC bang
Tham gia ngày: Dec 2005
Bài gửi: 315
: |
Trích:
- Thành viên mgdaubo có thắc mắc về phần công thức nên tôi cung cấp một chút thông tin cho bạn ý. - Topic này tính đến nay đã có gần 75 nghìn lượt xem và ít nhiều các nhóm cũng đã có kết quả cho nên không thể nói là đáng thất vọng được. Hơn nữa đây là diễn đàn nên việc "học hành" ở đây không giống như trên lớp. Khi tham gia điễn đàn, không ai bắt ai phải thi, phải nộp báo cáo, thuyết minh đầy đủ cả. - Đề tài tuy đã kết thúc nhưng các thông tin trong topic này vẫn còn giá trị của nó. Các thành viên mới vẫn có thể tham khảo và áp dụng vào công việc học tập của mình.
__________________
Sống là động nhưng lòng luôn bất động, Sống là thương nhưng lòng chẳng vấn vương, Sống yên vui danh lợi vẫn coi thường, Tâm bất biến giữa dòng đời vạn biến. Chú ý: đề nghị các thành viên đọc luồng dưới đây trước khi post bài: http://www.picvietnam.com/forum//showthread.php?t=1263 |
|
|
|
|
|
31-03-2009, 07:38 PM
|
#444 |
|
Đệ tử 4 túi
Tham gia ngày: Jul 2007
Bài gửi: 66
: |
gửi bác Mecha,ở đây em thật sự ko có ý gì cả,thật sự cái PID này người ta đã làm lâu lắm rồi,bây giờ mình làm lại,việc mở ra topic này là rất hay,nhưng cách làm theo kiểu phong trao hô hào rồi tất ngấm,em nói chỉ muốn để sau này có topic nào cũng hay như vầy nên làm có quy củ,ví dụ hướng dẫn từng module của PIC cần sử dụng,recommend nên dùng con PIC nào?tại sao?về thiết kế phần cứng về,giải thuật chung,....mô phỏng rồi thực nghiệm,để nếu ko đi đến cuối cùng thì các bạn lứa sau muốn làm cũng có cơ sở,chứ đã hơn 400 bài rồi mà vẫn có bạn hỏi về công thức PID,thì những bài trước đó nói về cái gì?
Cái DC này em đã làm 2,3 cái rồi,nhưng PID toàn mò,vì sao?ko có thông số động cơ mà thực tế đâu phải lúc nào em cũng có thể có được thông số động cơ để tìm hệ số PID theo lý thuyết này,lý thuyết nọ,rõ ràng thực tế rất khác với lý thuyết, Ở đây,em biết các bác mod và bang chủ đều rất giỏi,em ko dám chê ai,nhưng chúng ta có thể làm tốt hơn thế này phải ko các bác? |
|
|
|
|
02-04-2009, 10:19 AM
|
#445 |
|
Đệ tử 1 túi
Tham gia ngày: Sep 2008
Bài gửi: 20
: |
EM MỚI LÀM XONG CÁI NÀY . CHẠY THẤY CŨNG KHÁ TỐT INPUT <100Kz ĐIỀU KHIỂN PID NHƯNG HIỆN TẠI CHỈ NHỎ HƠN 40VOL. EM ĐANG LÀM CÁI SẺVO 200VOL - 20A BỊ MẮC KẸT CÁI NGUỒNG XUNG , BÁC NÀO CÓ CÁI NGUỒN DAO ĐỘNG NGHẸT NÀO CHẠY TỐT CHO EM XIN ĐƯỢC KHÔNG, VÌ LÀM ÁP CAO PHẢI CÓ NHIỀU NGUỒN ĐIỀU KHIỂN RIÊNG .
MONG CÁC BÁC GIÚP ĐƠ& http://www.youtube.com/watch?v=TTu06sOmMRA |
|
|
|
|
06-04-2009, 03:16 AM
|
#446 |
|
Nhập môn đệ tử
Tham gia ngày: Mar 2006
Bài gửi: 10
: |
Chào các bác em cung làm về đề tài pid điều khiển động cơ và cũng tìm các hệ số kp,ki,kd theo phương pháp thực nghiệm có điều động cơ của em khi chạy không tải thì đáp ứng khá tốt ở tốc độ cao . còn khi cho tốc độ nhỏ khoảng 30v/phút thì nó lại chạy rật cục,em thử rất nhiều giá trị pid mà không làm thay đổi tình hình . vả lại khi cho tải vào thì nó mất ổn định . Bác nào đã làm Pid cho động cơ với cả hai vòng phản hổi,dòng điện và tốc độ cho em xin mạch điện và chương trinh để tham khảo với
THANKS!!! |
|
|
|
|
06-04-2009, 04:02 AM
|
#447 | |
|
Trưởng lão PIC bang
Tham gia ngày: Dec 2005
Bài gửi: 315
: |
Trích:
Khi thay đổi giá trị của tải, bạn đã tính lại thông số cho PID chưa? Với vòng điều khiển dòng và tốc độ, bạn chỉ nên dùng PI thôi. Thành phần D có thể là nguyên nhân (phần mềm) gây cho đáp ứng động cơ của bạn bị giật. Ngoài ra có thể còn do thiết kế phần cứng của bạn nữa.
__________________
Sống là động nhưng lòng luôn bất động, Sống là thương nhưng lòng chẳng vấn vương, Sống yên vui danh lợi vẫn coi thường, Tâm bất biến giữa dòng đời vạn biến. Chú ý: đề nghị các thành viên đọc luồng dưới đây trước khi post bài: http://www.picvietnam.com/forum//showthread.php?t=1263 |
|
|
|
|
|
08-04-2009, 12:22 AM
|
#448 |
|
Nhập môn đệ tử
Tham gia ngày: Mar 2006
Bài gửi: 10
: |
trưởng lão cho em hỏi công thức PID dùng cho dong điện thì cũng giống công thức của tốc độ phải không vậy.em tìm trên mạng nhưng ít thấy nói về dùng pid để điều chỉnh dòng điện ,vì chúng em không được đào tạo bài bàn về điều khiển nên nhờ trưởng lão nói chi tiết một chút
THANKs |
|
|
|
|
08-04-2009, 12:45 AM
|
#449 |
|
Đệ tử 6 túi
Tham gia ngày: Apr 2006
Bài gửi: 125
: |
Về công thức tổng quát thì PID cho mạch tốc độ hay dòng điện đều như nhau, vấn đề là ở bộ tham số, người ta có nhiều cách để tính toán các bộ tham số cho mỗi mạch vòng (các đối tượng cần thiết kế là khác nhau nên các bộ tham số là khác nhau) bạn có thể tìm đọc cách thiết kế các bộ tham số trong nhiều sách khác nhau về đk tự động, truyền động điện
|
|
|
|
|
08-04-2009, 06:00 PM
|
#450 |
|
Trưởng lão PIC bang
Tham gia ngày: Dec 2005
Bài gửi: 315
: |
Như bạn mtuankct đã trả lời, công thức PID cho vòng dòng điện và tốc độ là như nhau (thường là PI). Chỉ khác nhau ở thông số P và I của bộ điều khiển. Vòng điều khiển dòng yêu cầu tốc độ đáp ứng phải nhanh hơn vòng tốc độ nên chu kỳ trích mẫu sẽ phải nhỏ hơn. Tương tự nếu vòng ngoài cùng là điều chỉnh vị trí thì chu kỳ trích mẫu của vòng tốc độ cũng phải nhỏ hơn chu kỳ trích mẫu của vòng điều chỉnh vị trí.
Chu kỳ trích mẫu được chọn theo định lý Nyquist-Shannon (http://en.wikipedia.org/wiki/Nyquist...mpling_theorem) thì tần số lấy mẫu được chọn > 2 lần bandwidth của hệ thống (tức là chu kỳ mẫu nhỏ hơn 2 lần): - Bandwidth của vòng điều chỉnh dòng điện vào khoảng 10^6 rad/s (chu kỳ khoảng 6 micro giây) => chu kỳ lấy mẫu tầm 3 micro giây. Mô phỏng với chu kỳ lấy mẫu nhỏ như thế này thì oki những khi lập trình thực tế thì vòng điều khiển (real-time) với chu kỳ lấy mẫu nhỏ như thế này là không tưởng. Nên thực tế thường thực hiện lấy mẫu cỡ 0.1 mili giây (10kHz). - Bandwidth của vòng điều chỉnh tốc độ vào khoảng 120-150 rad/s (20-25Hz) => tần số trích mẫu vào khoảng > 40-50Hz. Tuy nhiên thực tế thường chọn f của vòng điều chỉnh tốc độ vào khoảng 1kHz. - Bandwidth của vòng điều chỉnh vị trí vào khoảng 30-40 rad/s (5-6Hz) => tần số trích mẫu vào khoảng > 10-12Hz. Tuy nhiên thực tế thường chọn f của vòng điều chỉnh vị trí vào khoảng 100Hz. Thực hiện 3 tần số trích mẫu khác nhau trên cùng 1 hệ thống điều khiển real-time sẽ là một vấn đề. Cách đơn giản nhất là dùng tần số trích mẫu cơ bản = 10kHz, rồi dùng biến counter trong vòng lặp để giảm tần số trích mẫu xuống cho vòng tốc độ và vị trí. Ví dụ counter=10 sẽ được f=1kHz, counter=100 sẽ được f=100Hz.
__________________
Sống là động nhưng lòng luôn bất động, Sống là thương nhưng lòng chẳng vấn vương, Sống yên vui danh lợi vẫn coi thường, Tâm bất biến giữa dòng đời vạn biến. Chú ý: đề nghị các thành viên đọc luồng dưới đây trước khi post bài: http://www.picvietnam.com/forum//showthread.php?t=1263 |
|
|
|
|
|
|


 Mecha
Mecha
 Linear Mode
Linear Mode

