
|
|
Tài trợ cho PIC Vietnam |
||||||||
| Thực hành Bắt đầu làm một robot như thế nào? Mẹo vặt? Kỹ thuật? Công nghệ?... Hãy bắt tay vào việc... |
 |
|
|
Ðiều Chỉnh | Xếp Bài |
 13-09-2006, 10:18 PM
13-09-2006, 10:18 PM
|
#271 | |
|
Trưởng lão PIC bang
Tham gia ngày: Feb 2006
Nơi Cư Ngụ: Tp. HCM, Việt Nam
Bài gửi: 3,025
:  |
Trích:
Mắc Rs giữa âm nguồn và điểm nối các chân S của các MOSFET phía thấp. Thân,
__________________
Biển học mênh mông, sức người có hạn. Đang gặp vấn đề cần được giúp đỡ? Hãy dành ra vài phút đọc luồng sau: http://www.picvietnam.com/forum/showthread.php?t=1263 |
|

|

|
|
14-09-2006, 10:14 AM
|
#272 |
|
Đệ tử 3 túi
Tham gia ngày: Jun 2006
Bài gửi: 53
: |
anh Namqn ơi, có thể giải thích rõ hơn vai trò của chân sens trong mạch cầu được không ? ta đã dùng encoder để hồi tiếp tốc độ động cơ rồi thì thêm chân sens có ý nghĩa gì vậy anh. Em đọc trong datasheet của cầu LM18200 thì thấy nó nói rằng độ nhạy là 377uA/1A, để tối ưu độ chính xác và tuyến tính thì phải chọn điện trở giữa chân sens này với mas sao cho điện áp giới hạn giữa chân sens này với mas là 5V, và trong thiết kế đó thì nó chọn điện trở 2K. em mắc thử thì thấy mạch vẫn chạy tốt. mong anh giải thích thêm,
mến |
|
|
|
|
14-09-2006, 11:52 AM
|
#273 |
|
Nhập môn đệ tử
Tham gia ngày: Dec 2005
Bài gửi: 1
: |
ý kiến của anh Bang Chủ rất hay. nguồn nhân lực để làm việc này là sinh viên đúng không.
nhưng với chương trình đào tạo hiện nay ở các trường đại học. thì để có các kiến thức căn bản để có thể làm việc được là việc không phải đơn giản đối với các sinh viên năm đầu.nên việc hướng dẫn sinh viên năm đầu là rất cần thiết. Em rất mong sự góp ý của Bang chủ cho câu lạc bộ. nếu được hy vọng Bang chủ có thể đứng ra thành lập câu lạc bộ. mọi việc nên bắt đầu từ thấp đến cao |
|
|
|
|
14-09-2006, 01:07 PM
|
#274 | |
|
PIC Bang chủ

Tham gia ngày: May 2005
Bài gửi: 2,631
:  |
Trích:
Về phần nối chung chân, vì em đi mạch in chỉ nhỏ bằng 2 ngón tay và dài bằng hai đốt ngón tay. Gần như rất khít (đã bao gồm tản nhiệt), nên em gôm chung lại luôn. Nếu thiết kế thì có thể kéo chân ra test board để cắm. Em dự tính làm thêm một cái dãy test board cắm chân, để thực hành trong phòng thí nghiệm với các thiết bị trung bình, như kiểu động cơ. Em sẽ suy nghĩ lại phần thiết kế để thực hành cho đơn giản nhất. Thanks anh http://www.picvietnam.com/forum//showthread.php?t=79 Các bạn xem thêm bài viết trong luồng này để hiểu về hoạt động của R,C,D ở ngõ vào. Bài này viết lâu lắm rồi, và mạch này được dùng trong robot của F khi làm đề tài tốt nghiệp. Nó làm to oạch vì lý do cũng như các bạn, thời sinh viên, F không có nhiều điều kiện, mạch in đặt miễn phí ở phòng làm mạch in BK HCM, không phủ gì cả. Hồi đó phòng này mới thành lập, chưa làm được lỗ in nhỏ, chưa phủ xanh được. Bây giờ thì không biết thế nào rồi. Ai có thông tin về phòng làm mạch in này hiện nay, xin cung cấp cho mọi người biết. Chú ý, trong mạch này, lúc đó không tìm được Schotky, cho nên dùng 1N4007, và nó chỉ cho phép tối đa 3-5KHz thôi. Đây là bộ điều khiển không tốt. Trong mạch mới mà F đưa lên, dùng UC3611 thì nó có thể nâng tần số lên. Việc điều khiển ở 7.8KHz như trong báo cáo, là làm lụi theo kiểu thực hành, vì đưa lên 7.8KHz còn thấy chấp nhận được nên làm. Tuyệt đối anh em không bắt chước làm mấy cái trò lụi này của F nhé. Chúc vui
__________________
Công ty TNHH Thương mại và Giao nhận R&P store.hn@rpc.vn - store.hcm@rpc.vn Học PIC như thế nào? thay đổi nội dung bởi: falleaf, 14-09-2006 lúc 05:06 PM. |
|
|
|
|
|
14-09-2006, 02:15 PM
|
#275 | |
|
PIC Bang chủ
Tham gia ngày: May 2005
Bài gửi: 2,631
: |
Trích:
Có thể giải thích hiện tượng của nó được chăng? Chúc vui
__________________
Công ty TNHH Thương mại và Giao nhận R&P store.hn@rpc.vn - store.hcm@rpc.vn Học PIC như thế nào? |
|
|
|
|
|
16-09-2006, 12:42 AM
|
#276 |
|
Nhập môn đệ tử
Tham gia ngày: Apr 2006
Bài gửi: 2
: |
Chẳng ai giúp em cả.
Cái con motor của em nó có 4 chân. 2 chân dùng để cấp điện cho nó hoạt động. còn hai chân của chằng biết để nó làm gì. cho điện vào nó không hoạt động, mà khi nó quay hay gì đấy đo cũng chẳng thấy gì. Bác nào biết chỉ em cái, chứ bỏ đấy thì phí quá. |
|
|
|
|
16-09-2006, 01:51 AM
|
#277 |
|
Đệ tử 6 túi
Tham gia ngày: Mar 2006
Bài gửi: 129
: |
Mạch phản hồi dòng em dùng 2 con diode (nối từ 2 chân jump động cơ vào chân Rs) mắc với mạch Rs, thì diode đó có cần phải phục hồi nhanh hay chỉ cần 1N4007.
Nguyên lý của mạch phản hồi dòng có phải là tạo ra điện áp trên Rs để PIC đọc ADC ko anh. Nếu như vậy thì Vref=5V thì em nghĩ Rs=Vref/Imax |
|
|
|
|
16-09-2006, 03:44 PM
|
#278 | |
|
PIC Bang chủ
Tham gia ngày: May 2005
Bài gửi: 2,631
: |
Trích:
Vì vậy, em đo thử hai sợi dây không có gì đó với vỏ của động cơ xem, nó có nối với nhau không. Nếu đúng, thì hai dây đó chỉ là nối với vỏ động cơ thôi. Chúc vui.
__________________
Công ty TNHH Thương mại và Giao nhận R&P store.hn@rpc.vn - store.hcm@rpc.vn Học PIC như thế nào? |
|
|
|
|
|
18-09-2006, 10:57 AM
|
#279 |
|
Đệ tử 6 túi
Tham gia ngày: Mar 2006
Bài gửi: 129
: |
Anh Nam, mạch phản hồi dòng của em 2 con diode d7,d8 là diode thường hay phục hồi nhanh ko anh.
Anh có thể giải thích thêm cách chọn Rs 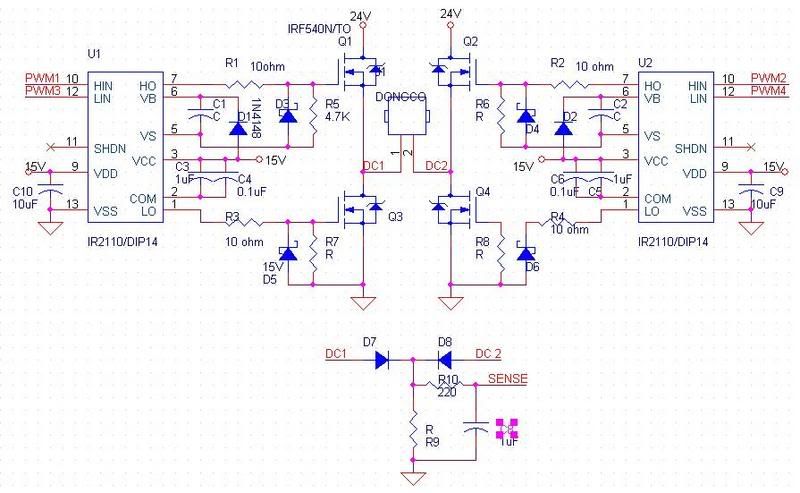 thay đổi nội dung bởi: scentoflove, 18-09-2006 lúc 11:01 AM. |
|
|
|
|
18-09-2006, 07:14 PM
|
#280 | |
|
Trưởng lão PIC bang
Tham gia ngày: Feb 2006
Nơi Cư Ngụ: Tp. HCM, Việt Nam
Bài gửi: 3,025
: |
Trích:
Nếu chọn Rs để áp rơi cực đại trên nó bằng với Vref của ADC thì chúng ta tổn thất quá nhiều điện áp (áp nguồn chỉ có 24V). Do đó chúng ta thường chỉ chọn Rs để áp rơi ứng với dòng cực đại là khoảng 1V trở lại, và chúng ta sẽ dùng một mạch khuếch đại để nâng mức áp đó lên trước khi đưa nó vào ADC của PIC. Vì tầm điện áp là từ 0V đến 1V (chẳng hạn), các OPAMP dùng trong mạch khuếch đại sẽ cần có rail-to-rail input. Tính ví dụ, chọn 1V là áp cực đại, dòng cực đại qua Rs là 2A, vậy Rs = 1/2 = 0.5 ohm (công suất trên điện trở này là 1V*2A = 2W!). Nếu để áp trên Rs cực đại là 5V, với dòng cực đại là 2A, thì công suất tiêu tán trên điện trở này là 5V*2A = 10W!! Hy vọng các bạn hình dung ra vấn đề. Thân,
__________________
Biển học mênh mông, sức người có hạn. Đang gặp vấn đề cần được giúp đỡ? Hãy dành ra vài phút đọc luồng sau: http://www.picvietnam.com/forum/showthread.php?t=1263 |
|
|
|
|
|
18-09-2006, 07:24 PM
|
#281 | |
|
Trưởng lão PIC bang
Tham gia ngày: Feb 2006
Nơi Cư Ngụ: Tp. HCM, Việt Nam
Bài gửi: 3,025
: |
Trích:
Chân sense để phản hồi giá trị dòng điện, có thể dùng để bảo vệ quá tải, ngắn mạch, cũng có thể dùng để tính toán trong một số phương pháp điều khiển, vì dòng điện qua động cơ tỷ lệ với mômen điện từ sinh ra trong động cơ. Giải thích về chân sense của LMD18200: có 2 cảm biến dòng điện sẽ cảm nhận dòng điện qua 2 MOSFET phía cao, sau đó đưa vào mạch ổn định và tạo dòng ở chân sense của vi mạch. Chúng ta sẽ mắc một điện trở chuẩn vào giữa chân này và 0V để tạo áp rơi tỷ lệ với dòng điện (dùng cho các mạch điều khiển, giới hạn dòng). Với LMD18200 thì chân sense của nó cho phép chúng ta chọn ngưỡng dòng để tác động, vì giá trị điện trở khác nhau sẽ tạo ra áp rơi khác nhau. Nguyên tắc cảm nhận dòng điện của LMD18200 khác với cách chúng ta làm ở đây (có lẽ nó đang dùng cảm biến Hall, do đó mới có thông số độ nhạy 377 uA/A). Nếu chúng ta dùng điện trở Rs như trong các mạch cầu H đang được thực hiện ở đây thì độ nhạy sẽ là 1A/1A (chúng ta dùng giá trị thực của dòng điện). Giá trị 2k mà họ dùng đảm bảo điều kiện áp rơi không quá 5V so với GND, do đó mạch chạy tốt là đương nhiên. Thân,
__________________
Biển học mênh mông, sức người có hạn. Đang gặp vấn đề cần được giúp đỡ? Hãy dành ra vài phút đọc luồng sau: http://www.picvietnam.com/forum/showthread.php?t=1263 |
|
|
|
|
|
19-09-2006, 09:01 AM
|
#282 |
|
Đệ tử 3 túi
Tham gia ngày: Jun 2006
Bài gửi: 53
: |
anh trả lời rất thuyết phục. cảm ơn anh nhiều.
mến |
|
|
|
|
19-09-2006, 10:28 AM
|
#283 |
|
Đệ tử 3 túi
Tham gia ngày: Jun 2006
Bài gửi: 53
: |
em đã vẽ xong phần mạch điều khiển động cơ servo dùng cầu LM18200, các anh tham khảo góp ý cho nhé.
mến |
|
|
|
|
19-09-2006, 01:36 PM
|
#284 |
|
PIC Bang chủ
Tham gia ngày: May 2005
Bài gửi: 2,631
: |
Phần mạch cầu H, anh Nam sẽ comment thêm cho em nếu cần. Còn phần thiết kế, anh có mấy điểm chú ý:
1) Phần RS232, em sử dụng chuẩn bootloader của picvietnam (tìm lại bài báo cáo này do Chính cung cấp) Hồi trước Chính làm cái hình bé xíu, anh không nhớ Chính đã gửi báo cáo lên và sửa lại chưa. Em nên thiết kế theo chuẩn đó. 2) Phần nạp trình cho PIC trên board, với chuẩn đó, em cũng nên thiết kế header theo chuẩn ICSP-BLD của picvietnam, như vậy sẽ có thể phát triển và hỗ trợ công cụ một cách thống nhất. >> Như vậy, chúng ta sẽ thống nhất chuẩn thiết kế cho mạch chạy PIC ở phần này luôn. 3) Về phần encoder, theo anh, em kô cần làm quá phức tạp, chỉ cần em cấp trực tiếp vào chân vi điều khiển là xong. Rất nhiều thiết kế dùng các con FF đưa vào để tạo xung tốt hơn, nhưng anh thấy với PIC không cần thiết phải làm vậy. Nếu em có osc, em có thể lấy quan sát thử, nó chả mất xung đâu (nhớ tính phần chu kỳ ngắt cho tốt là được). 4) Nếu để tăng độ mịn, anh nghĩ em nên dùng cả hai ngắt trên hai chân. Như vậy, lợi thế nhất là em dùng interrupt onchange trên portb. Vì như vậy, em có thể đọc được độ mịn lên gấp 4 lần, khi đọc encoder. Chúc vui
__________________
Công ty TNHH Thương mại và Giao nhận R&P store.hn@rpc.vn - store.hcm@rpc.vn Học PIC như thế nào? |
|
|
|
|
19-09-2006, 04:28 PM
|
#285 |
|
Đệ tử 3 túi
Tham gia ngày: Jun 2006
Bài gửi: 53
: |
Khi em điều rộng xung với tần số 19500Hz, dutycycle = 100% để điều khiển không tải động cơ, nhưng em đếm số vòng động cơ hồi tiếp về không ổn định.
khi chu kì lấy mẫu càng giảm thì độ dao động càng cao , đây là các giá trị tốc độ đưa về (vòng/phút) (em dùng RS232 để đưa tốc độ về hiển thị trên máy tính, chu kì láy mẫu là 0.8s, nếu giảm xuống sai lệch còn lớn hơn nhiều ) 50 1750 2000 1750 2000 1750 1750 2000 1750 1750 2 000 1750 1750 2000 1750 1750 2000 1750 1750 1750 2 000 1750 1750 2000 1750 1750 1750 1750 1750 1750 1 750 1750 1750 1750 1750 1750 2000 1750 1750 1750 1 750 1750 1750 2000 1750 1750 1750 1750 1750 2000 1 750 1750 1750 1750 1750 1750 1750 2000 1750 1750 1 750 1750 1750 1750 2000 1750 1750 1750 1750 1750 1 750 1750 1750 2000 1750 1750 1750 1750 1750 1750 1 750 2000 1750 1750 1750 1750 1750 1750 1750 2000 1 750 1750 1750 1750 1750 1750 1750 1750 1750 các anh có thể giải thích được không? mến |
|
|
|
|
|
|


 namqn
namqn
 falleaf
falleaf Linear Mode
Linear Mode

