
|
|
Tài trợ cho PIC Vietnam |
||||||||
| Thực hành Bắt đầu làm một robot như thế nào? Mẹo vặt? Kỹ thuật? Công nghệ?... Hãy bắt tay vào việc... |
 |
|
|
Ðiều Chỉnh | Xếp Bài |
 29-06-2006, 03:35 PM
29-06-2006, 03:35 PM
|
#61 |
|
Đệ tử 3 túi
Tham gia ngày: Jun 2006
Bài gửi: 53
: |
Chào mọi người,
tiếp thu ý kiến của anh F, bọn tớ sẽ thêm phần đế maika để mô hình chắc chắn hơn, thẩm mỹ hơn. À, tớ vừa sưu tầm được một sơ đồ mạch động lực điều khiển động cơ servo dùng cầu H, mời các bạn cùng tham khảo và cho ý kiến nhé, so với sơ đồ của anh F thì mạch này có một số điểm khác sau: - Mạch dùng FET để làm khoá điện tử vì đáp ứng tần số của FET cao hơn tranitor (minh nghĩ thế). - Các cổng NAND của IC 74LS00 giữ cho hai tín hiệu thuận (FOR) và ngược (REV) khoá chéo lẫn nhau nhằm tránh hiện tượng trùng dẫn của hai cặp FET. tại mỗi thời điểm chỉ có một cặp FET được dẫn mà thôi. - Các diod Zener bảo vệ cực cổng của FET. mến. |

|

|
|
29-06-2006, 03:57 PM
|
#62 |
|
Đệ tử 3 túi
Tham gia ngày: Jun 2006
Bài gửi: 53
: |
À quên nữa, mấy cái tải của bọn em làm bằng sắt đó anh F, sơn màu đỏ lên cho đẹp thôi.
 mến |
|
|
|
|
30-06-2006, 02:03 AM
|
#63 |
|
Đệ tử 3 túi
Tham gia ngày: Jun 2006
Bài gửi: 51
: |
Hi chào buổi tối
 Bọn mình cũng xin chia sẻ luôn quá trình tiến hành làm mô hình cho các bạn quan tâm. Trước tiên bọn mình đến tiệm của anh Falleaf chỉ bữa trước mua động cơ (ở đó có 2 cái và tụi mình đã mua một cái , cái kia cũng xịn kô biết giờ còn ở đó kô ).Kế đến tụi mình đi mua cục sắt làm tải. Cái này mua trên đường Tạ UYÊN (hỏi chợ sắt chỗ nào người ta chỉ cho, bọn mình mua 8K một kg). Hihi sau đó tất nhiên là việc tìm một tiêm tiện để tiện cục tải và làm đế động cơ. Bọn mình làm việc này trên tiệm ở đường Vĩnh Viễn (đoạn cắt với Nguyễn Tiểu La mất 50K). Giai đoạn này cũng nên mua các phụ kiện như ốc vít, bulong ... trước vì đến đó thường là họ kô có. Còn về phần meka đang kiếm chỗ.Hi vọng mai kiếm được và sẽ nói cho mọi người và đưa luôn phần giá cả. Nói chung chỗ chúng mình mua khá gần Nhật Tảo. Các bạn có thể đi một buổi là mua đủ các đồ cần thiết (chỉ mất thời gian đi mua động cơ thôi )Hi vọng người nào có kinh nghiêm hoặc có chỗ nào hay hơn thì đưa lên cho mọi người tham khảo. Chúc ngủ ngon hoanf thay đổi nội dung bởi: hoanf, 30-06-2006 lúc 02:08 AM. |
|
|
|
|
30-06-2006, 10:19 AM
|
#64 | |
|
Đệ tử 3 túi

Tham gia ngày: Jul 2005
Bài gửi: 47
: |
Trích:
Thứ hai: Ở tần số tương đối cao mạch trên vẫn bị trùng dẫn do không có phần điều khiển dead-time. Thứ ba: giờ mới nhìn thấy , Rg=3k3 là quá lớn--> tần số đóng mở sẽ nhỏ (tại sao thì xem trong giáo trình điện tử công suất).À mà thông thường các ông làm robot ở BKHN dùng 74HC00 chứ không dùng 74LS00 thay đổi nội dung bởi: sphinx, 30-06-2006 lúc 10:23 AM. |
|
|
|
|
|
30-06-2006, 06:03 PM
|
#65 |
|
Đệ tử 3 túi
Tham gia ngày: Jun 2006
Bài gửi: 53
: |
chào mọi người, cảm ơn ý kiến của bác sphinx, mình sẽ thay con 74HC00, còn phần opto có bác nào có giải pháp vừa cách li mạch công suất với mạch điều khiển vừa đảm bảo đáp ứng tần số cao không.
mến |
|
|
|
|
30-06-2006, 06:43 PM
|
#66 |
|
Nhập môn đệ tử
Tham gia ngày: May 2006
Bài gửi: 1
: |
Hay quá các bác ơi!Em cũng muốn tham gia vào đề tài này,vì thấy ý tương này cũng đc .Chắc chắn là có nhiều thú vị rất mong su hỗ trợ từ diễn đàn
|
|
|
|
|
30-06-2006, 07:14 PM
|
#67 | |
|
Đệ tử 3 túi
Tham gia ngày: Jul 2005
Bài gửi: 47
: |
Trích:
Tại sao ta cần sử dụng cách ly quang?? Không dùng có sao không??? Câu trả lời là chẳng sao cả Cách ly quang chỉ nên sử dụng khi bạn muốn mạch điều khiển và phần công suất dùng riêng nguồn. - Để điều khiển cầu H có thể sử dụng chíp điều khiển nửa cầu chuyên dụng họ IR như IR2103, IR2110.... Loại này được bán với giá ~20k. Khi đó cầu H hoàn toàn là n-MOSFET. (với các loại FET công suất lớn thì điều khiển kiểu này là lựa chọn duy nhất vì khó tìm được p-MOSFET công suất lớn). - Ngoài ra ta có thể sử dụng cầu H hỗn hợp n-p với mạch điều khiển ngoài. Vấn đề quan trọng nhất của mạch này là làm sao để đóng mở FET nhanh và tránh được hiện tượng trùng dẫn khi băm xung ở tần số cao. Hãy tham khảo mạch điều khiển servo của một ông Nhật dưới đây(Cái hình hơi to )Chú ý khối điều khiển dead-time và mạch mồi FET nhá Mạch mồi FET đã được kiểm chứng, kết quả đo đạc rất tốt ở tần số đến 50kHz http://elm-chan.org/works/smc/smc.png  thay đổi nội dung bởi: sphinx, 01-07-2006 lúc 01:32 PM. |
|
|
|
|
|
30-06-2006, 07:21 PM
|
#68 | |
|
PIC Bang chủ

Tham gia ngày: May 2005
Bài gửi: 2,631
:   |
Trích:
Chúc vui
__________________
Công ty TNHH Thương mại và Giao nhận R&P store.hn@rpc.vn - store.hcm@rpc.vn Học PIC như thế nào? |
|
|
|
|
|
30-06-2006, 10:23 PM
|
#69 |
|
Đệ tử 6 túi
Tham gia ngày: Mar 2006
Bài gửi: 129
: |
Sau 3 ngày chiến đấu với encoder cuối cùng mới có được động cơ TRE (tamagawa) để tham gia
Type 1981N56E8 Encoder 1000xung Rated voltage 32V, rated curent 4.5A. datasheet đã up ở trên Mấy cục tải thì em củng đã làm rồi kích thước 50*50*30 mm, làm bằng sắt. Hình ảnh thì mọi người cho khất tới chủ nhật sẽ up lên (ko thể online 2 ngày buồn quá hic hic) Về vấn đề opto em coi datasheet thi con P521 (datasheet LP521) thì reponse rise time là 4us và reponse fall time là 3us -> tần số cao nhất là 140Khz ko hiểu sao mọi người lại nói ko đáp ứng kịp (thực tế em đã đk vị trí 1 động cơ 396 xung 100W dùng opto p521 trong mạch FET_Relay tần số PWM là 19.53KHz thì vẩn đáp ứng tốt) Nghiêm 79/H4 Âu Cơ P14 Q11 Tp HCM. Nếu đươc thì anh F gửi cho em con LMD18245 thay cho gửi PIC (kiếm con này mấy ngày rồi mà ko có) thay đổi nội dung bởi: scentoflove, 30-06-2006 lúc 10:36 PM. |
|
|
|
|
30-06-2006, 10:54 PM
|
#70 | |
|
PIC Bang chủ
Tham gia ngày: May 2005
Bài gửi: 2,631
: |
Trích:
Chúc vui
__________________
Công ty TNHH Thương mại và Giao nhận R&P store.hn@rpc.vn - store.hcm@rpc.vn Học PIC như thế nào? |
|
|
|
|
|
30-06-2006, 11:27 PM
|
#71 | |
|
Trưởng lão PIC bang
Tham gia ngày: Feb 2006
Nơi Cư Ngụ: Tp. HCM, Việt Nam
Bài gửi: 3,025
: |
Trích:
Thân,
__________________
Biển học mênh mông, sức người có hạn. Đang gặp vấn đề cần được giúp đỡ? Hãy dành ra vài phút đọc luồng sau: http://www.picvietnam.com/forum/showthread.php?t=1263 |
|
|
|
|
|
01-07-2006, 01:10 AM
|
#72 |
|
Nhập môn đệ tử
Tham gia ngày: Mar 2006
Bài gửi: 6
: |
Hay quá, bọn em cũng đã làm một cái điều khiển động cơ này, nhưng ko làm phần đế (lười quá
). Xin mạo muội đưa trước cho các bác xem mô hình (bọn em quay lại bằng điện thoại - có 4 M thôi à ) )http://haminhtranhanh.googlepages.com/21062006036.mp4 Còn đây là cái giao diện chương trình: http://haminhtranhanh.googlepages.com/giaodien.JPG Cái này bọn em làm rồi mang đi báo cáo, nhưng cái động cơ encoder lởm, nên em mang về định làm tiếp cho ok hoàn toàn thì thôi. Em sẽ làm lại cái mô hình giống mấy bác (cho em xem cái mẫu với) và xem lại phần giao tiếp (lúc đúng lúc ko - nếu may mà đúng thì nó sẽ vẽ cái đồ thị rất đẹp - phần này dùng để kiểm tra mình điều khiển có đúng ko). Hy vọng trong 2 tuần tới sẽ sớm đưa lên cho các bác. Động viên em cái xem nào |
|
|
|
|
01-07-2006, 01:29 AM
|
#73 | |
|
Đệ tử 3 túi
Tham gia ngày: Jul 2005
Bài gửi: 47
: |
Trích:
Đo xung bằng Oscilo chưa? Thử đo xem nếu băm ở 20k thì xung ra phía sau con opto có dạng gì nhá PWM ở 20k, nếu băm 8 bít thì con opto cần đáp ứng được tần số 20kHzx256, bằng bao nhiêu ý nhỉ thay đổi nội dung bởi: sphinx, 01-07-2006 lúc 01:33 AM. |
|
|
|
|
|
01-07-2006, 02:32 AM
|
#74 | |
|
Đệ tử 6 túi
Tham gia ngày: Mar 2006
Bài gửi: 129
: |
Trích:
)Nếu có sai số thì giống như anh namqn nói khi duty ở 1 khoản nhỏ hơn 20% thì PWM sẽ bị sai về áp trung bình ngõ ra (duty <20% thì do đáp ứng opto nên =20% do đó áp trung bình là 20%). Em ko có oscilo để đo nhưng thực tế em đã làm với mạch FET_Relay cho PWM tăng từ 0-1023 (10bit) thi thực tế động cơ vẫn đáp ứng khác nhau từ chậm cho tới nhanh dần. Sau đây là số liệu em có được từ thực tế PWM 0-25: động cơ ko quay PWM 25-40:động cơ bắt đầu quay 1 cách khó khăn sau đó smooth dần PWm 40-100: động cơ quay nhanh dần 0-100 chỉ khoản 10% PWM nhưng động cơ đáp ứng được. Em chỉ dựa vào thực tế đã làm qua để nói (lý thuyết đâu biết gì đâu toàn học mấy anh trên diễn đàn thôi )Anh F cho em hỏi cái này trước đậy em làm đk vị trí ko tải nên ko để ý tới đk dòng qua động cơ chỉ quan tâm PWM. Em muốn làm đk với tải thay đổi thì có những cách nào (em chỉ biết là đk dòng qua động cơ -> nhắc là nhớ tới 18245 )Hình up lên là minh họa PWM thay đổi nội dung bởi: scentoflove, 01-07-2006 lúc 02:35 AM. |
|
|
|
|
|
01-07-2006, 02:59 AM
|
#75 |
|
Đệ tử 6 túi
Tham gia ngày: Mar 2006
Bài gửi: 129
: |
Biết ai ko mechatronic, he he làm interface xấu quá. Interface nè
dao động liên tục 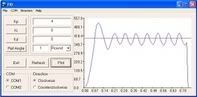 dao động tắt dần 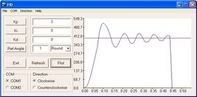 vọt lố 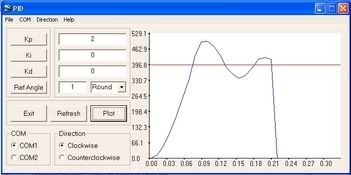 vọt lố sau đó tiến tới set point 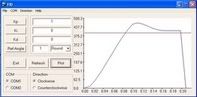 Cái nét cuối đồ thị là do soft thêm vào ko phải đáp ứng động cơ. làm cho mình xài nên mọi người đừng chê nha buồn lắm đó. Ko biết cách phóng to ra (75% nhung nó vẫn cứ chọn 50%) thay đổi nội dung bởi: falleaf, 01-07-2006 lúc 11:14 AM. |
|
|
|
|
|
|


 falleaf
falleaf namqn
namqn Linear Mode
Linear Mode

