
|
|
Tài trợ cho PIC Vietnam |
||||||||
| Thực hành Bắt đầu làm một robot như thế nào? Mẹo vặt? Kỹ thuật? Công nghệ?... Hãy bắt tay vào việc... |
|
|
Ðiều Chỉnh | Xếp Bài |
 01-07-2006, 02:59 AM
01-07-2006, 02:59 AM
|
#11 |
|
Đệ tử 6 túi
Tham gia ngày: Mar 2006
Bài gửi: 129
: |
Biết ai ko mechatronic, he he làm interface xấu quá. Interface nè
dao động liên tục 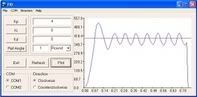 dao động tắt dần 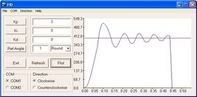 vọt lố 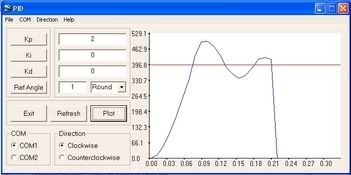 vọt lố sau đó tiến tới set point 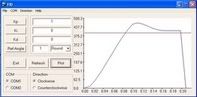 Cái nét cuối đồ thị là do soft thêm vào ko phải đáp ứng động cơ. làm cho mình xài nên mọi người đừng chê nha buồn lắm đó. Ko biết cách phóng to ra (75% nhung nó vẫn cứ chọn 50%) thay đổi nội dung bởi: falleaf, 01-07-2006 lúc 11:14 AM. |

|

|
| Ðiều Chỉnh | |
| Xếp Bài | |
|
|








 Threaded Mode
Threaded Mode