
|
|
Tài trợ cho PIC Vietnam |
||||||||
| Thực hành Bắt đầu làm một robot như thế nào? Mẹo vặt? Kỹ thuật? Công nghệ?... Hãy bắt tay vào việc... |
 |
|
|
Ðiều Chỉnh | Xếp Bài |
 26-07-2007, 06:40 PM
26-07-2007, 06:40 PM
|
#376 | |
|
Trưởng lão PIC bang
Tham gia ngày: Feb 2006
Nơi Cư Ngụ: Tp. HCM, Việt Nam
Bài gửi: 3,025
:  |
Trích:
Thân,
__________________
Biển học mênh mông, sức người có hạn. Đang gặp vấn đề cần được giúp đỡ? Hãy dành ra vài phút đọc luồng sau: http://www.picvietnam.com/forum/showthread.php?t=1263 |
|

|

|
|
27-07-2007, 12:41 AM
|
#377 |
|
Đệ tử 1 túi
Tham gia ngày: Jul 2007
Bài gửi: 15
: |
Chào các bạn, mình vừa đọc mẩu tin về điều khiển PID cho động cơ DC và biết rằng PIC Vietnam cần những thành viên làm sample cho việc này. Hiện mình đang làm ở CVN (CanonVietnam). Mình đã từng sử dụng AT89C51 để đo tốc độ động cơ DC hiển thị ra LED 7 vạch. Trong công ty mình sản xuât máy in loại mobile khá hiện đại và có rất nhiều động cơ DC có gắn sẵn encoder với độ phân giải khá lớn 600 vạch/vòng. Động cơ này tuy nhỏ nhưng có thể chịu đựng mức điện áp 32V và speed max trên 9000 vòng/phút. Mình mới lập trình trên PIC 18F452 và cũng biết qua một số chức năng cơ bản nhưng chưa thành thạo và hiểu sâu các chức năng này. Mình rất muốn tham gia vào hoạt động này. Đối với mình công việc mà một thành viên phải làm như đã nêu thật quá dễ vì ở trong công ty mình những thứ để làm ra phần cứng như vậy rất sẵn.
|
|
|
|
|
05-08-2007, 06:39 PM
|
#378 |
|
Đệ tử 1 túi
Tham gia ngày: Jul 2007
Bài gửi: 15
: |
Hiện giờ mình đã chuẩn bị đầy đủ phần cứng cho việc thực hành điều khiển PID cho DC motor. Mình sử dụng PIC 18F452 để điều khiển và DC motor loại nhỏ thôi (Umax=32V) có gắn sẵn encoder loại 600 xung/vòng. IC driver dùng loại L298 (sử dụng cả 2 cầu H để tăng dòng chịu tải). Lần đầu mình tính chỉ hàn câu dây thôi. Khi nào chạy OK mới vẽ Orcad để làm mạch in hoàn chỉnh. Hiện mình vẫn đang đọc phần PWM trong datasheet. Khi nào có câu hỏi gì mong các bạn giải thích giúp.
|
|
|
|
|
18-08-2007, 12:28 PM
|
#379 |
|
Đệ tử 2 túi

Tham gia ngày: Jun 2007
Bài gửi: 43
: |
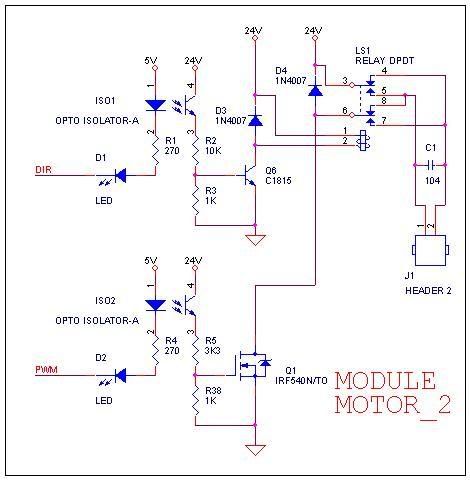 Mình đang tìm hiểu vê đề tài này.Nhưng chưa biết rõ nguyên lý hoạt động của mạch công suất ntn? 1.Tốc độ động cơ phụ thuộc vào dòng điện qua cuộn dây,vậy chân PWM xuất xung ntn để ?Có phải tần số càng cao thì tốc đọ động cơ càng lớn,chu kỳ duty ảnh hưởng ntn? 2.Nguyên lý hoạt động các module trên mạch như FET,relay ntn? 3.Nguyên lý hoạt động tỏng quát của mạch ra sao? Bạn nào đã làm rồi hay hiểu thì có thể giải thích gium` mình hay chỉ link có sẵn cũng được.Cám ơn nhiều.Chúc vui vẻ |
|
|
|
|
20-08-2007, 03:06 AM
|
#380 | |
|
Đệ tử 1 túi

Tham gia ngày: Aug 2007
Bài gửi: 12
: |
Trích:
http://dientuvietnam.net/forums/showthread.php?t=6804 |
|
|
|
|
|
13-09-2007, 09:07 PM
|
#381 | |
|
Nhập môn đệ tử
Tham gia ngày: Mar 2007
Bài gửi: 2
: |
Trích:
bạn có thể post lại được không nếu vẽ kỹ lại sơ ồ thì càng tốt |
|
|
|
|
|
12-10-2007, 05:38 PM
|
#382 | |
|
Đệ tử 1 túi

Tham gia ngày: Sep 2007
Bài gửi: 14
: |
Trích:
Thân. |
|
|
|
|
|
30-10-2007, 10:16 AM
|
#383 |
|
Đệ tử 2 túi
Tham gia ngày: Mar 2007
Bài gửi: 43
: |
no hoat động như sau
pwm-> kít hai mức 0, va 1 khi kít mức 0 thi fet dẩn lam cho dồng cơ có dòng đổ qua thi no hoạt động còn duty có ảnh hưởng ntn tới tốc độ động cơ thì nó la ntn : thời gian kít mức 0 cang chím nhiều trong chu kỳ thì %tốc độ động cơ càng cao còn relay thì nó chỉ làm nhiệm vụ đảo chiều dộng cơ thôi khi chan dir dược kít thì trans đuoc kít làm relay chuyen trang thái :d hihi giai thich như thế không biết có đúng không các bac chỉ hộ tôi với |
|
|
|
|
08-11-2007, 10:11 AM
|
#384 |
|
Nhập môn đệ tử

Tham gia ngày: Nov 2007
Bài gửi: 2
: |
Chào các bác em cũng đang có một đề tầi về con encoder này nhưng làm với con PSOC cụ thể là như thế này:
Đo tốc độ xe và đo quãng đường côngtơmet Đầu vào : Cảm biến vòng quay mỗi vòng, bộ kiểm soát tốc độ báo về 2 xung Quy chuẩn ra km/h và km Độ chính xác 0.1km Nhờ các bác chỉ bảo giúp về tkế hệ thống,sơ đồ khối phần mềm và code chương trình |
|
|
|
|
08-11-2007, 10:57 AM
|
#385 |
|
Nhập môn đệ tử
Tham gia ngày: Nov 2007
Bài gửi: 2
: |
Các bác có thể giup em thiết kế mạch đo tốc độ xe và quãng đường công tơ met sử dụng con PSOC với :
đầu vào :Cảm biến vòng quay mỗi vòng . bộ kiểm soát tốc độ báo về 2 xung, độ chính xác 0.1km Tkees sơ đồ khối phần mềm, code chương trình |
|
|
|
|
29-11-2007, 09:50 PM
|
#386 | |
|
Đệ tử 2 túi
Tham gia ngày: Jan 2007
Bài gửi: 34
: |
Trích:
Gửi các bạn tham khao một ý kiến nhỏ khi hiệu chỉnh theo tải bộ điều khiển PID ! Đặc tính điều áp bằng pp điều chế độ rộng xung(PWM) này là một họ đường thẳng song song với nhau, tốc độ không tải lí tưởng thay đổi mà độ cứng đặc tính cơ không thay đổi. Khi làm bài toán PID các bạn chú ý với tải Mc = cosnt thì khi thay đổi tốc độ điểm làm việc của hệ truyền động sẽ thay đổi theo nên các bạn phải tính tương ứng với việc hiệu chỉnh Kx để có điểm làm việc và đáp ứng đầu ra mong muốn.Nếu tải Mc != cosnt(dạng bậc hai, hypepol hay bậc nhất...) thì các bạn phải khảo sát, phân tích hệ truyền động tương ứng và tính toán theo đặc tính của phụ tải + đặc tính của động cơ (= Hệ TDD ) từ đó xác định được các điểm làm việc tương ứng với phụ tải mà bạn thay đổi . |
|
|
|
|
|
24-12-2007, 03:03 PM
|
#387 |
|
Đệ tử 2 túi
Tham gia ngày: Jan 2007
Bài gửi: 34
: |
Các cao thủ PIC trong luồng này không biết đã làm xong hết phần PID này chưa mà lâu rồi không thấy thảo luận nữa? Mình mày mò làm thực hành với PIC nhưng vừa mới kiếm được 1 em động cơ có Encorder 100x/v giống của tinhthanthep định làm theo các bạn. Không biết các bạn đã thực hiện xong chưa và kết quả có khả quan không để minh đọc kỹ lại luồng này từ đầu và làm theo? rất mong các cao thủ cầm trịch trong luồng hồi đáp!
|
|
|
|
|
24-12-2007, 03:09 PM
|
#388 |
|
Đệ tử 2 túi
Tham gia ngày: Jan 2007
Bài gửi: 34
: |
Nếu như các cao thủ đã làm xong và có báo cáo rồi thì mong F bang chủ post báo cáo lên diễn đàn cho anh em làm sau học theo mới!Mình dạo này mới có thời gian lên diễn đàn nhiều hơn vì bây giờ muốn nghiên cứu kỹ tên PIC6F877A.
|
|
|
|
|
01-01-2008, 12:20 PM
|
#389 |
|
Đệ tử 2 túi
Tham gia ngày: Jan 2007
Bài gửi: 34
: |
Help me!Help me!
Mình muốn làm một bộ điều khiển PID như của bạn. Mình kiếm mãi mới tìm được một em động cơ Encorder 100x/v. Mình đã đọc hết tất cả những bài bạn viết trong luồng "Tìm người làm bài thực hành PID..." và muốn bạn giúp đỡ trong quá trình làm. Không biết luồng trên còn làm việc không hay xong rồi mà mình hỏi mãi không thấy ai trả lời cả. Mình down sơ đồ nguyên lý của bạn bằng Orcard về rồi nhưng không sao mở được,bạn vẽ trên orcard 9.0,9.1,hay 10.0 vậy. Nếu có thể bạn gửi cho mình cả sơ đồ và chương trình bạn viết cho PID giao tiếp với máy tính được không?Cảm ơn bạn nhiều! Mình thực sự rất muốn thử làm cái bạn đã làm này. Cám ơn bạn rất nhiều!Happy New Year 2008! Nếu có thể gửi cho mình qua mail nguyenvan_lanh3@yahoo.com.Mong học hỏi ở bạn nhiều điều bổ ích nhờ các bạn và PICVN!
|
|
|
|
|
02-01-2008, 12:54 AM
|
#390 |
|
Đệ tử 5 túi
Tham gia ngày: Apr 2007
Bài gửi: 121
: |
Sao ko thảo luận tiếp vậy các bác. Chủ đề này rất hay mà.
|
|
|
|
|
|
|


 namqn
namqn
 Linear Mode
Linear Mode

