
|
|
Tài trợ cho PIC Vietnam |
||||||||
| Thực hành Bắt đầu làm một robot như thế nào? Mẹo vặt? Kỹ thuật? Công nghệ?... Hãy bắt tay vào việc... |
 |
|
|
Ðiều Chỉnh | Xếp Bài |
 15-09-2007, 10:22 AM
15-09-2007, 10:22 AM
|
#61 |
|
Đệ tử 4 túi

Tham gia ngày: Mar 2006
Bài gửi: 83
: |
Em đã dùng thử cặp này rồi, và sơ đồ mắc mạch cũng không khác là gì mấy so với các mạch của mấy anh ghi ở đây nhưng có lẽ 32A là dòng ghi của nhà sản xuất thôi
Em đã dùng thử mạch DC H Bridge kích cho : - 1 động cơ khoảng 12A thì rất nóng (đã đầy đủ tản nhiệt và quạt) và có thể hư bất cứ lúc nào (độ tin cậy không cao). - Cấp dòng cho cuộn kích từ nhưng lên khoảng 10A là có vấn đề rồi (rất nóng ) PS: Mạch ở trên là em đã nối song song 2 con IRF trên cùng một nhánh rồi đó tức là em dùng đến 4 con IRF540 và IRF9540 (vì em nghĩ nối song song dòng sẽ chia đôi được) chứ nếu chỉ mắc 1 con trên 1 nhánh như mấy anh thì 3A là con đó bốc khói rồi - Ah anh Nam đã dùng thử mạch này và thử kích dòng tối đa chưa? Nên em không biết là nên dùng cặp nào khác ngon hơn không chứ nếu dùng IGBT thì em phải đổi mạch và làm lại từ đầu Xin cám ơn thay đổi nội dung bởi: hanhluckyly, 15-09-2007 lúc 10:28 AM. |

|

|
|
16-09-2007, 10:14 PM
|
#62 |
|
Trưởng lão PIC bang
Tham gia ngày: Feb 2006
Nơi Cư Ngụ: Tp. HCM, Việt Nam
Bài gửi: 3,025
:  |
Nếu bạn xem datasheet thì sẽ thấy với IRF540, ngay cả vận hành ở 100 độ C thì dòng định mức của nó vẫn là 23 A. Do đó MOSFET của bạn bị bốc khói ở 3A là một trường hợp bất thường.
Tôi đã dùng khá nhiều MOSFET công suất, và thông thường là những linh kiện mới có thông số tốt hơn thông số trong datasheet chút ít. Tôi đề nghị bạn thử riêng các MOSFET như sau: - Làm một mạch thử MOSFET rất đơn giản, có một chiết áp để thay đổi áp cấp cho cực gate (nên có zener bảo vệ cho MOSFET), dùng một tải trở và nguồn đủ mạnh để thử đến mức dòng mà bạn muốn vận hành lâu dài. Tải đơn giản nhất là các bóng đèn dây tóc, bạn có thể có công suất lớn và có luôn sự chỉ thị khi tải có dòng đi qua. Ví dụ, với nguồn 24 V, bạn muốn có dòng điện là 5 A, như vậy bạn có thể tìm các bóng đèn 24V/25 W và 24V/50 W để mắc phối hợp thành tải cần thiết. - Sau khi có mạch thử nghiệm rồi bạn tăng dần điện áp gate đến khi đạt được dòng điện mong muốn qua tải (có thể dùng một điện trở công suất 0.1 ohm chẳng hạn để xác định giá trị dòng qua tải, điện trở này tất nhiên nối tiếp với tải và có công suất đủ lớn, 10 W cho dòng tải tối đa là 10 A). Bạn đo điện áp rơi giữa cực drain và cực source của MOSFET, từ giá trị điện áp rơi này và dòng tải, bạn có thể tính ra điện trở Rdson ở giá trị điện áp gate đó, hay tính ra công suất tiêu tán khi MOSFET dẫn dòng. Tôi cũng muốn hỏi thêm tản nhiệt của bạn: bạn có biết nhiệt trở của cánh tản nhiệt khi đã được làm mát bằng quạt là bao nhiêu không? Nếu không biết nhiệt trở đó thì bạn có thể cho biết nó cánh tản nhiệt hình dạng ra sao, kích thước bao nhiêu. Tôi cho rằng vấn đề có thể nằm ở chỗ tổn hao dẫn của MOSFET đang là khá lớn và cánh tản nhiệt chưa tản nhiệt đủ cho MOSFET. Tôi đang dùng MOSFET ở các dòng điện đỉnh gần với giá trị định mức tại 25 độ C, tần số làm việc của mạch là khoảng 200 kHz (tôi dùng chuyển mạch mềm), do đó tôi khẳng định là các MOSFET có thể làm việc ở các điều kiện mà nhà sản xuất đã nêu trong datasheet. Thân,
__________________
Biển học mênh mông, sức người có hạn. Đang gặp vấn đề cần được giúp đỡ? Hãy dành ra vài phút đọc luồng sau: http://www.picvietnam.com/forum/showthread.php?t=1263 |
|
|
|
|
17-09-2007, 12:54 AM
|
#63 |
|
Đệ tử 6 túi
Tham gia ngày: Mar 2006
Bài gửi: 129
: |
Sau nhiều lần test với các tụ khác nhau thì chỉ có tần số <1khz là chạy ổn định. Các tần số lớn hơn áp 2 đầu động cơ dao dộng và đảo chiều động cơ khi sau khi vận tốc về 0 thì random có lúc được lúc ko.
Mạch IR thiết kế để kích FET tần số cao có thể >100Khz. Ko biết mạch em làm sai chổ nào, Cb=0.47uF Rgate 10ohm Db 4148 Chương trình test mạch như sau: D1 D0 đk 2 FET thấp, 2 chân PWM 0 1 đk 2 FET cao, duty max 4095, tần số 500hz Code:
output_high(pin_D0);
output_high(pin_D1);
while(1)
{
delay_ms(10);
output_low(pin_D1);
delay_ms(5);
setmotorsspeed(3000);
delay_ms(5000);
setmotorsspeed(0); <= cú pháp của hàm chỉ có 1 đối số!?
output_high(pin_D1);
output_high(pin_D0); <= những lệnh thao tác ngõ ra này nên nằm trong hàm setmotorsspeed()
delay_ms(10);
output_low(pin_D0);
delay_ms(5);
setmotorsspeed(-3000);
delay_ms(5000);
setmotorsspeed(0); <= cú pháp của hàm chỉ có 1 đối số!?
output_high(pin_D1);
output_high(pin_D0);
}
setmotorsspeed (signed long duty)
{
if(duty==0){
set_power_pwm_override(1, true, 0);
set_power_pwm_override(0, true, 0);
}else if(duty<0){ <= if cái gì < 0?!
set_power_pwm_override(1, true, 0);
set_power_pwm_override(0, false, 0);
set_power_pwm0_duty(-Duty);
}else{
set_power_pwm_override(0, true, 0);
set_power_pwm_override(1, false, 0);
set_power_pwm0_duty(Duty);
}
}
thay đổi nội dung bởi: scentoflove, 18-09-2007 lúc 12:16 AM. |
|
|
|
|
17-09-2007, 02:08 AM
|
#64 |
|
Trưởng lão PIC bang
Tham gia ngày: Feb 2006
Nơi Cư Ngụ: Tp. HCM, Việt Nam
Bài gửi: 3,025
: |
Bạn muốn nói là thử với nhiều loại tụ khác nhau hay với nhiều giá trị tụ khác nhau? Tôi đã đề nghị bạn dùng tụ tantalum, bạn đã thử chưa?
Nếu bạn cho động cơ chạy không tải, bạn cần có thời gian chờ khá lớn để động cơ giảm tốc độ, sau đó mới đổi chiều quay. Trong code của bạn, khoảng thời gian chờ đó là khoảng 10 ms, rất không thực tế. Code của bạn cũng có nhiều chỗ không ổn. Tôi đã chú thích trong code của bạn rồi, bạn hãy xem lại. Thân,
__________________
Biển học mênh mông, sức người có hạn. Đang gặp vấn đề cần được giúp đỡ? Hãy dành ra vài phút đọc luồng sau: http://www.picvietnam.com/forum/showthread.php?t=1263 |
|
|
|
|
18-09-2007, 12:28 AM
|
#65 |
|
Đệ tử 6 túi
Tham gia ngày: Mar 2006
Bài gửi: 129
: |
Thời gian giữa đảo chiều e giảm từ 10s xuống còn 10ms để test. Còn tụ thì em cũng có xài tụ tantalum rồi 2.2uF.
Khi thử duty <50% thì ở tần số cao (20Khz 32Khz) động cơ chạy êm tăng duty >50% thì lại giật giật |
|
|
|
|
18-09-2007, 12:49 AM
|
#66 | |
|
Trưởng lão PIC bang
Tham gia ngày: Feb 2006
Nơi Cư Ngụ: Tp. HCM, Việt Nam
Bài gửi: 3,025
: |
Trích:
Thân,
__________________
Biển học mênh mông, sức người có hạn. Đang gặp vấn đề cần được giúp đỡ? Hãy dành ra vài phút đọc luồng sau: http://www.picvietnam.com/forum/showthread.php?t=1263 |
|
|
|
|
|
20-09-2007, 12:08 AM
|
#67 |
|
Đệ tử 6 túi
Tham gia ngày: Mar 2006
Bài gửi: 129
: |
Hic hình của pwm vào chân Hin và ngỏ ra Ho của mạch. Cạnh lên và cạnh xuống gần như trùng với pwm, nhưng khi pwm=0 thì ngõ ra rất lạ
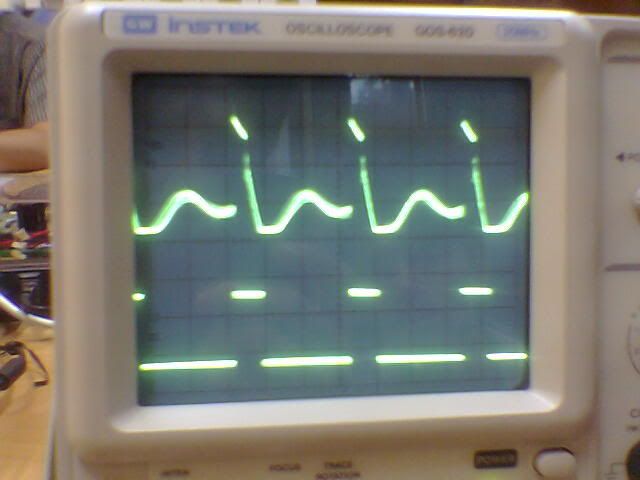 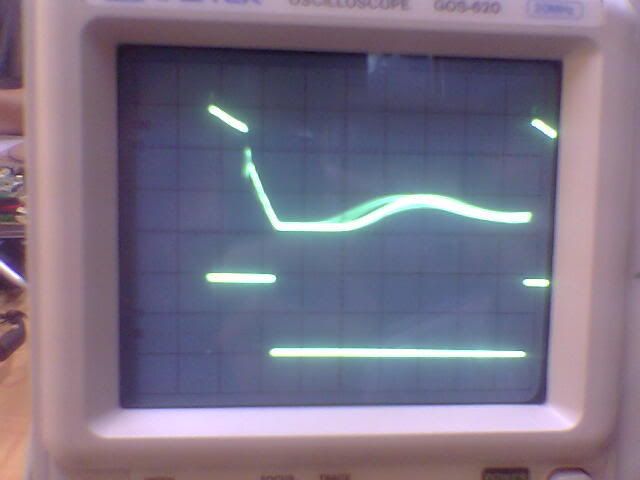  Còn 1 điều lạ là khi ở tần số cao cạnh xuống của pwm có nhiễu (dao động quanh mức 0 3-4 lần rồi về 0) như hình thứ 3. thay đổi nội dung bởi: scentoflove, 20-09-2007 lúc 12:15 AM. |
|
|
|
|
20-09-2007, 01:39 AM
|
#68 |
|
Trưởng lão PIC bang
Tham gia ngày: Feb 2006
Nơi Cư Ngụ: Tp. HCM, Việt Nam
Bài gửi: 3,025
: |
Bạn chú thích thêm về các dạng sóng trong các hình. Tôi đoán sóng vuông phía dưới là ngõ ra của PIC/ngõ vào của mạch kích.
Bạn cho biết điểm GND của 2 dạng sóng đó ở đâu. Bạn đo Ho thì GND của kênh đó nối đi đâu? Nhờ bạn chỉ dùng 1 kênh nhưng đo điện áp giữa hai đầu cực của động cơ. Bạn không chụp hình các setup trên máy hiện sóng, nên nhờ bạn cho biết time scale của các hình khác nhau luôn (1 div theo chiều ngang là bao nhiêu ms, hay us?). Hình đầu tiên là trường hợp nào, và hình thứ hai là trường hợp nào? Tôi đề nghị bạn đo với PWM > 50%, nhưng trong các hình bạn gửi lên thì có vẻ PWM < 50%. Thân,
__________________
Biển học mênh mông, sức người có hạn. Đang gặp vấn đề cần được giúp đỡ? Hãy dành ra vài phút đọc luồng sau: http://www.picvietnam.com/forum/showthread.php?t=1263 |
|
|
|
|
20-09-2007, 10:14 AM
|
#69 |
|
Đệ tử 6 túi
Tham gia ngày: Mar 2006
Bài gửi: 129
: |
GND là mass của mach, xung vuông ở dưới là ngỏ ra PIC và ngỏ vào Hin, xung ở trên là ngay chân Ho của IR. Tất cả các hình đều ở tần số 20khz (theo công thức trong datasheet thạch anh 10Mhz PLL x4) nhưng trên máy chình scale 20us 1 ô thì đếm 1 chu kỳ pwm >4ô (12.5Khz dù đã chỉnh scale bằng tần số chuẩn 1khz trên máy) -> sau đó thì em chỉ quan tâm tới hình dạng ung chứ ko quan tâm tới tần số trên máy có giống với tần số tính theo công thức hay ko (đầu tiên e đo ở 20Khz sau đó tăng giảm 10Khz 1Khz 312.5Khz 500Hz) gần như biên dạng xung là gần giống nhau như hình.
Đã đo thì đương nhiên là em có đo duty <50% và >50% nhưng khi >50% máy ko ra được dạng xung cố định để chụp hình (ra dạng xung như hình 1 chút rồi thành 1 đường ngang nhiễu giống như khi để tay vào đầu dò của máy cứ như vậy lặp đi lặp lại) thay đổi nội dung bởi: scentoflove, 20-09-2007 lúc 10:38 AM. |
|
|
|
|
20-09-2007, 05:44 PM
|
#70 |
|
Trưởng lão PIC bang
Tham gia ngày: Feb 2006
Nơi Cư Ngụ: Tp. HCM, Việt Nam
Bài gửi: 3,025
: |
Bạn hãy đọc lại post #66 của tôi, tôi nhờ bạn đo dạng sóng ngõ ra của PIC khi duty cycle > 50%, để kiểm tra xem lỗi ở phía PIC hay ở phía mạch công suất, chứ tôi biết rằng ở duty cycle > 50% thì động cơ của bạn chạy giật giật rồi.
Tôi cũng có đề nghị bạn chỉ dùng 1 kênh và đo dạng sóng giữa hai đầu động cơ, trong post #68. Bạn đo cho cả hai trường hợp duty cycle < và > 50%. Bạn thí nghiệm thêm những phần tôi vừa nói rồi chúng ta thử bàn xem bạn đang gặp vấn đề ở khâu nào. Bạn nhớ cho biết luôn scale cho các kênh tín hiệu (1 div dọc tương ứng với bao nhiêu V, cho từng kênh khác nhau luôn). Thân,
__________________
Biển học mênh mông, sức người có hạn. Đang gặp vấn đề cần được giúp đỡ? Hãy dành ra vài phút đọc luồng sau: http://www.picvietnam.com/forum/showthread.php?t=1263 |
|
|
|
|
20-09-2007, 06:44 PM
|
#71 |
|
Đệ tử 6 túi
Tham gia ngày: Mar 2006
Bài gửi: 129
: |
Mới ở trường về đọc bài này đo lại lần nữa với 2 tần số 1k(div ngang la 0.2ms) và 20k (div ngang là 20us). Em ko chú lắm div dọc
Duty 40% tần số 1K 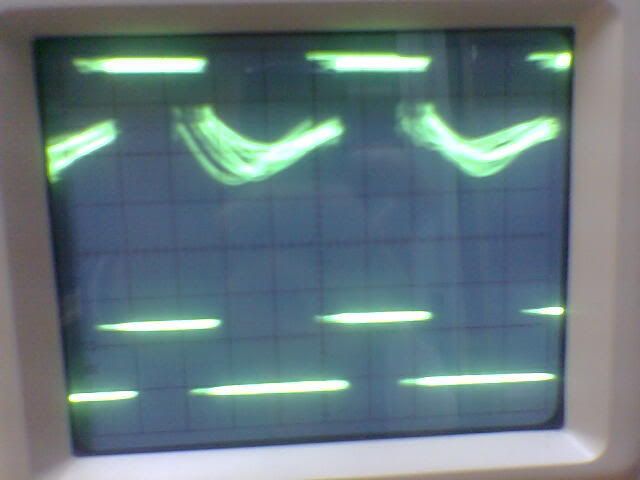 Duty 80% tần số 1K 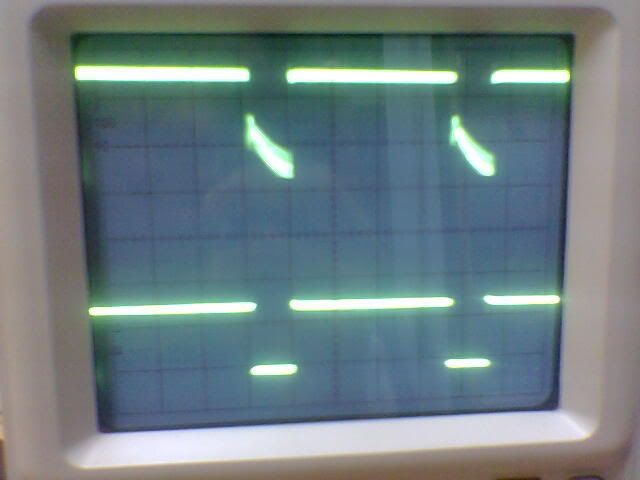 Duty 40% tần số 20K  Duty 70% tần số 20K  Cạnh lên và cạnh xuống của Ho gần như trùng với pwm, như ở mức 0 sau khi cạnh xuống về 0 Ho lên lại duty >50% Ho sau khi về 0 xu hướng lên ngang với mức 1 và động cơ đang chạy thì dừng lại, sau đó thì chạy lại bình thường cứ như vậy. Khi có tải nặng động cơ gần như ko quay thì Ho mới ở mức 0 cho tới khi có cạnh lên của pwm. 1 xung pwm và Ho rõ nhât là như hình Tần số càng cao thì Ho càng lên sát mức 1, tần số thấp Ho như hình trên. Em nghĩ vấn đề là ở mức 0 của Ho. trên trường có mạch cầu H xài IR2104 Db 4001 Cb tụ hóa 3.3uF Rgate 10ohm ko có 4 điện trở giữa gs mạch chạy rất tốt đo xung rất đẹp thay đổi nội dung bởi: scentoflove, 20-09-2007 lúc 07:03 PM. |
|
|
|
|
20-09-2007, 11:48 PM
|
#72 |
|
Trưởng lão PIC bang
Tham gia ngày: Feb 2006
Nơi Cư Ngụ: Tp. HCM, Việt Nam
Bài gửi: 3,025
: |
Chúng ta đang bàn về các vấn đề kỹ thuật, trong đó các mức điện áp của các dạng sóng mang ý nghĩa quan trọng. Bây giờ bạn nói rằng không chú ý đến scale của các kênh thì tôi không bàn thêm được. Lấy ví dụ, nếu mức áp cao nhất của HO là 30 V thì có bất thường không khi áp nguồn cấp cho động cơ là 24V, và nếu mức áp cao nhất của HO là 24 V thì sao? Lẽ ra tôi còn phải hỏi mức GND của bạn nằm ở đâu trong các hình đó. Dạng sóng là quan trọng, nhưng ít nhất với tôi, các giá trị cụ thể tại các mức điện áp khác nhau là quan trọng hơn.
Thân,
__________________
Biển học mênh mông, sức người có hạn. Đang gặp vấn đề cần được giúp đỡ? Hãy dành ra vài phút đọc luồng sau: http://www.picvietnam.com/forum/showthread.php?t=1263 |
|
|
|
|
22-09-2007, 01:56 PM
|
#73 |
|
Nhập môn đệ tử
Tham gia ngày: May 2007
Bài gửi: 2
: |
ở SaiGon có ai biết chỗ bán IR2110, hay các con tương tự không, thấy mọi người bàn luận sôi nổi quá, chắc các pac biết chỗ mua nhỉ, chỉ cho mọi người với
|
|
|
|
|
23-09-2007, 09:10 AM
|
#74 |
|
Đệ tử 6 túi
Tham gia ngày: Mar 2006
Bài gửi: 129
: |
Mua ở HN đó bạn, 269 Đội Cấn Cty Toàn Cầu, ở Tp mình ko biết chổ mua
thay đổi nội dung bởi: scentoflove, 23-09-2007 lúc 12:21 PM. |
|
|
|
|
29-09-2007, 07:06 PM
|
#75 |
|
Đệ tử 6 túi
Tham gia ngày: Mar 2006
Bài gửi: 129
: |
Sau khi làm lại mạch và cháy 1 số IR2110, thì sáng nay đo được những hình sau. Div dọc cho xung trên pwm là 2V, div dọc xung dưới chân g của FET là 5V
Tần số 1k div 0.2ms duty 50% 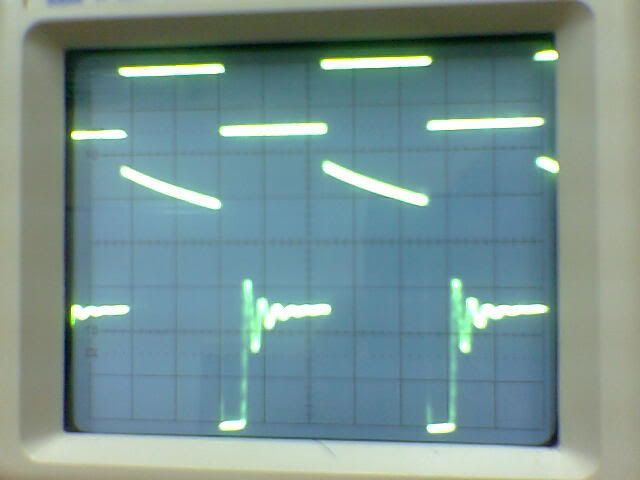 Tần số 5khz div 0.50ms duty 25% 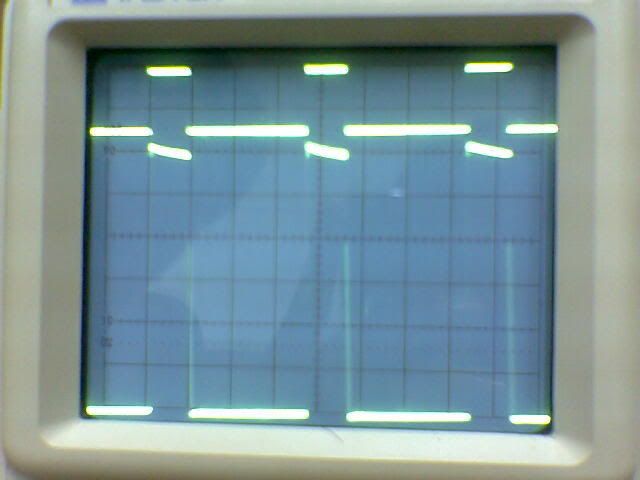 Tần số10khz div 20us duty 25% 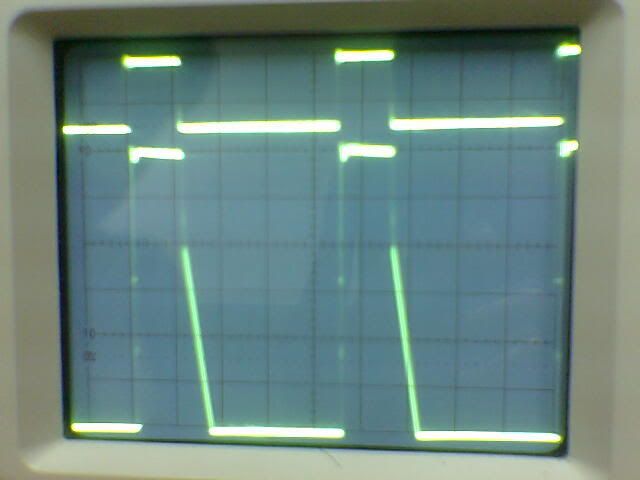 duty 50% 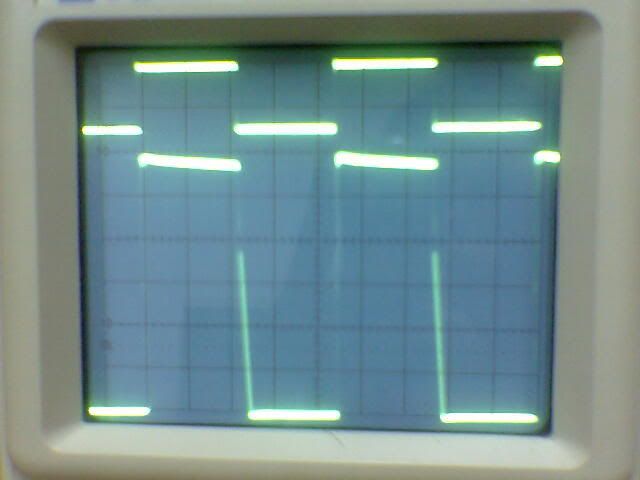 Tần số 20khz div 10us duty 25% 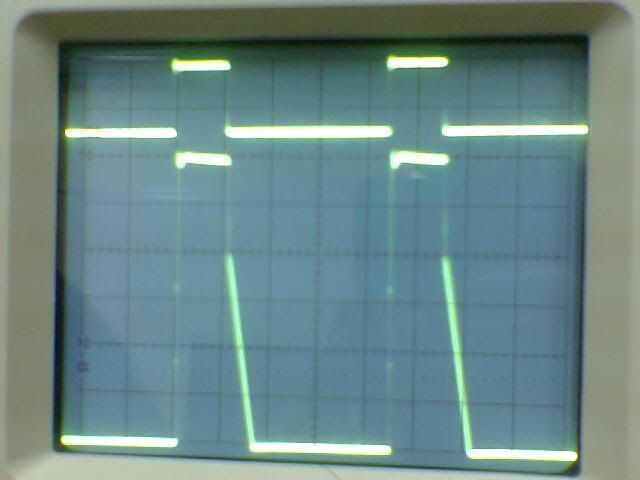 Tần số 40khz div 5us duty 25%  Tần số 100khz div 0.5us duty 50%  duty >50% thì hình giống như duty<50%, nhưng tần số càng cao thì duty mã càng giảm 10khz duty max 95%, 20khz 90%, 40khz 85%,100khz 70% Cạnh xuống của các hình bị lài ra có phải là do điện trở Rgate tạo ra ko?? Tần số 10khz là cạnh xuống tốt nhát, càng cao càng bị lại ra. |
|
|
|
|
|
|


 namqn
namqn
 Linear Mode
Linear Mode

