
|
|
Tài trợ cho PIC Vietnam |
||||||||
| Thực hành Bắt đầu làm một robot như thế nào? Mẹo vặt? Kỹ thuật? Công nghệ?... Hãy bắt tay vào việc... |
 |
|
|
Ðiều Chỉnh | Xếp Bài |
 26-06-2006, 09:42 AM
26-06-2006, 09:42 AM
|
#46 |
|
Đệ tử 6 túi
Tham gia ngày: Mar 2006
Bài gửi: 129
: |
Về mạch cầu H em có ý kiến như vầy mạch cầu H phụ thuộc vào 4 con FET nên khi 1 trong 4 con ko tốt (mua FET cũ, FET mới thì khỏi bàn) thi đáp ứng của 1 trong 2 chiều sẽ ko tốt, ko bằng nhau.
Còn mạch FEt_Relay thi đáp ứng được cả 2 chiều quay như nhau vì chỉ có 1 con FET, bù lại mạch FET_relay ko thể brake thay đổi nội dung bởi: scentoflove, 26-06-2006 lúc 08:38 PM. |

|

|
|
27-06-2006, 03:06 AM
|
#47 | |
|
PIC Bang chủ

Tham gia ngày: May 2005
Bài gửi: 2,631
:   |
Trích:
Em cố gắng hoàn thành mô hình trong tuần này và gửi hình cho mọi người tham khảo. Mọi người cũng vậy, lịch chúng ta đặt ra là trong 1 tuần, cố gắng thực hiện mô hình và cho mọi người cùng xem nhé. Giai đoạn 2, chúng ta sẽ thiết kế các mạch điều khiển động cơ. Chúng ta sẽ xem thử coi, các động cơ sẽ rơi vào trong các khoảng giá trị nào, chúng ta sẽ cùng nhau thiết kế mạch điều khiển động cơ. Trên mạch điều khiển động cơ, phải có chân giao tiếp RS232 với máy tính. Chuẩn mạch in 5x2 dùng cho ICSP và BLD như hình sau: 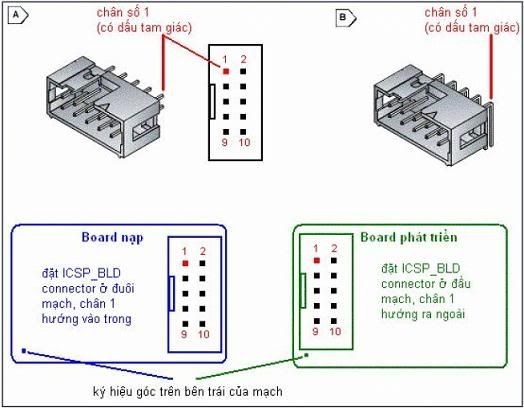 Khi đó, chuẩn giao tiếp RS232 cũng làm dạng 5x2 như vậy, vì chúng ta sẽ thực hiện bộ sản phẩm này, tổng hợp tất cả các hoạt động của picvietnam đã làm được trong thời gian qua. Trên mạch công suất, tất nhiên có sẵn PIC luôn, để đỡ tốn kém phần mạch in. Ai thích thiết kế thành 2 module rời nhau cũng được. Xong giai đoạn thiết kế, trong khi chờ các bạn đặt mạch in, picvietnam sẽ gửi PIC cho các bạn qua đường bưu điện bằng chuyển phát nhanh. Khi các bạn nhận được PIC, chỉ cần test một vài thuật toán cơ bản, có lẽ chúng ta cũng sẽ viết mẫu ở trên này một vài chương trình mẫu, vì mạch đã có, động cơ đã có... Đấy là giai đoạn 3, test sự hoạt động của bộ thí nghiệm và làm mạch điều khiển. Nói chung là test tất cả các module. Giai đoạn này, các bạn sẽ phải học sử dụng hyperterminal và matlab, hoặc 20-sim để vẽ lại dữ liệu thu được từ encoder. Giai đoạn 4, chúng ta sẽ đi về phần lý thuyết, hiểu đôi nét về động cơ DC. Tìm hiểu về bài toán điều khiển PID, những vấn đề lý thuyết xoay quanh bộ điều khiển PID. Biến đôi từ hệ liên tục sang hệ rời rạc và thực hiện giải thuật PID trên PIC. Các bạn sẽ tìm hiểu và bổ sung lý thuyết ở phần này cho nhau, và sau đó, các bạn sẽ lập trình thử một chương trình với Kp, Ki, Kd bất kỳ, rồi các bạn tự chọn bằng tay, nhìn vào kết quả, tự chọn, tự suy nghĩ về bản chất của bộ điều khiển PID, với những lý thuyết mà chúng ta đã thảo luận, rồi dựa vào ý nghĩa vật lý mà chúng ta đã thảo luận đó, để tự chọn bộ PID cho động cơ của mình. Giai đoạn này, các bạn sẽ học bằng cách cảm nhận. Phải thúc đẩy mạnh mẽ cảm nhận của các bạn về điều khiển. Mọi vấn đề chúng ta làm ở đây, là để cho các bạn có các cảm giác với sự điều khiển, bộ điều khiển. Các bạn từ cảm giác và lý thuyết, sẽ rút ra được nhiều vấn đề bổ ích, mà tự mỗi người mới thấy được, và thu hoạch được. Có thể phần này sẽ là một phần tương đối khó khăn, hoàn toàn không có các lý thuyết, nguyên lý để tìm được bộ điều khiển tốt ở đây, và các bạn sẽ cảm thấy rằng chẳng lẽ bộ điều khiển PID là mò? Chúng ta sẽ cùng nhau so sánh các kết quả, và sẽ cùng thảo luận và kết luận. Tin F đi, F không muốn đưa phần lý thuyết điều khiển sâu lên trước, mà muốn các bạn thực hành mò trước, sẽ có lợi, F khẳng định. Khá tốn thời gian cho giai đoạn này. Nếu ai có thể vượt qua giai đoạn này, và đi đến giai đoạn thứ 5, người đó sẽ có thể làm được những cái mà có lẽ không mấy người ở picvietnam làm tốt hơn các bạn, vì giai đoạn 5 sẽ phân nhánh, và mỗi người sẽ được giao một bài báo về các thuật toán PID để thực hiện. Tất nhiên, các bài báo sẽ được phổ biến chung hết, nhưng mỗi người sẽ chỉ làm theo một cách mà thôi. Giai đoạn 5, sau khi đã hiểu được bài toán PID, vấn đề cốt lõi là làm sao tìm được hệ số PID để điều khiển động cơ. PID được dùng 90% trong công nghiệp, Robust control chỉ khoảng 1,2%, còn lại là Fuzzy, riêng Optimal control chỉ dùng trong các bài toán ngành Hàng không, vũ trụ, Tên lửa... 90% trong số các bộ điều khiển PID trong công nghiệp là các hệ SISO, và 70% trong số đó là bộ điều khiển PI (bỏ thành phần D). 50% trong số các bộ điều khiển PI, là các bộ điều khiển không được cho là tốt, có nghĩa là hoạt động được, nhưng không phải là các bộ điều khiển hoàn toàn tốt (rất khó giải thích nghĩa chỗ này, ý nói rằng người thiết kế cũng không hài lòng lắm, mặc dù nó đạt yêu cầu). Cho nên, ai dám nhận mình là điều khiển PID đỉnh cao, người đó nói dóc  . Cho nên, các bạn không việc gì phải sợ khi làm điều khiển PID. À, F không nói là điều khiển PID động cơ DC nhé, vì cái này người ta làm nhão như cháo rồi, F nói về các hệ điều khiển trong công nghiệp nói chung. Nhưng chúng ta đều mới tập tễnh làm thực hành với động cơ, chẳng có gì đáng sợ, chẳng có gì đáng ngại. . Cho nên, các bạn không việc gì phải sợ khi làm điều khiển PID. À, F không nói là điều khiển PID động cơ DC nhé, vì cái này người ta làm nhão như cháo rồi, F nói về các hệ điều khiển trong công nghiệp nói chung. Nhưng chúng ta đều mới tập tễnh làm thực hành với động cơ, chẳng có gì đáng sợ, chẳng có gì đáng ngại.Như đã nói ở trên, mỗi người tiếp tục làm đến giai đoạn 5, sẽ được giao một bài báo về lựa chọn bộ điều khiển PID, và các bạn thử làm theo các phương pháp đó để ra kết quả. Khi làm xong, chúng ta sẽ tập hợp tất cả các kết quả và thuật toán lại, và thử chéo với nhau. Các bạn hình dung, chúng ta sẽ gặt hái được gì sau khi làm bài thực hành này rồi chứ? Khi kết thúc, picvietnam rất muốn có một bài báo cáo của các bạn, và picvietnam biết rằng các bạn sẽ có rất nhiều thứ để viết, rất nhiều hình ảnh để chụp. Xin lưu ý, picvietnam có người chụp hình chuyên nghiệp, khi cần những hình ảnh đẹp, hãy liên hệ picvietnam. Báo cáo của các bạn cực kỳ có ý nghĩa, mong rằng các bạn hiểu điều đó. Thật sâu sắc, thật tự hào khi mình làm xong việc. Hãy giữ lại mô hình của các bạn, có thể, các bạn sẽ thấy hứng thú nếu chúng ta tiếp tục với bộ điều khiển fuzzy  . 10% còn lại của các bộ điều khiển trong công nghiệp. . 10% còn lại của các bộ điều khiển trong công nghiệp.Kết luận: Qua quá trình thực hành này, các bạn sẽ học được những gì? a) Tinh thần làm việc: F tin tưởng rằng, qua quá trình làm việc này, các bạn sẽ thực sự trở thành những thành viên không thể thiếu của picvietnam, và các bạn sẽ có một tinh thần đoàn kết cao, tinh thần chia sẻ cao, khi làm việc online và làm việc với picvietnam. b) Kiến thức: Chắc chắn, kiến thức các bạn sẽ có được, đó là: - Giao tiếp máy tính qua RS232 - Vi điều khiển PIC: Viết chương trình bằng CCS C, thiết kế mạch chạy PIC, làm việc với PIC với các chức năng: I/O, PWM, interrupt, timer - Thiết kế driver cho động cơ DC - Vài kiến thức căn bản về Matlab và 20-sim, đặc biệt 20-sim có lẽ sẽ là lần đầu tiên được giới thiệu trên một diễn đàn, và tương lai có thể sẽ được đưa vào giảng dạy ở VN. - Tất nhiên, đặc biệt, các bạn sẽ hiểu một cách sâu sắc về PID hơn rất nhiều, vào có lẽ, khi các bạn hoàn tất giai đoạn 5, có thể cái mà các bạn làm sẽ không một ai trong picvietnam đã từng thử làm qua, hoặc có khi chưa bao giờ biết về nó, nếu có biết thì cũng chỉ là đọc báo. c) picvietnam sẽ làm gì với những kết quả này? Nếu như các bạn thực sự có sức lực đi đến bước thứ 5, chúng ta sẽ có khá nhiều cái hay ho, và có thể chúng ta sẽ cùng nhau viết một bài báo, đứng tên picvietnam.com để gửi đến các báo khoa học Việt Nam (tự động hoá chẳng hạn). Đó là việc thứ nhất. Việc thứ hai, chúng ta sẽ tập hợp và viết lại thành một cuốn tutorial ngắn, tổng hợp từ các báo cáo của các bạn thành viên tham gia dự án này và sẽ được đưa vào một luồng đặc biệt, khoá lại để làm tài liệu tham khảo, kèm với tất cả nội dung của luồng thảo luận này. Đây sẽ là bài hướng dẫn online sống động nhất về điều khiển mà F được biết (nhưng thời điểm này, nó vẫn là SẼ LÀ). Vẽ ra quá xa rồi, các bạn cố gắng giữ tiến độ nhé. Chúc vui
__________________
Công ty TNHH Thương mại và Giao nhận R&P store.hn@rpc.vn - store.hcm@rpc.vn Học PIC như thế nào? thay đổi nội dung bởi: falleaf, 27-06-2006 lúc 03:08 AM. |
|
|
|
|
|
27-06-2006, 09:14 AM
|
#48 |
|
Đệ tử 3 túi
Tham gia ngày: Jun 2006
Bài gửi: 53
: |
Chào mọi người,
bọn em đã mua đủ phần linh tinh để làm mô hình thí nghiệm rồi, chắc chắn trong vài ngày đến sẽ pót mô hình lên cho các bạn xem. Còn về động cơ, em mua được một cái ngoài chợ trời, tiết rằng cái nhãn mờ quá nên không đọc thông số kỹ thuật được, nên không biết bao nhiêu vol, bao nhiêu xung nữa, có bác nào có kinh nghiệm về động cơ chỉ dùm em cách kiểm tra thông số của nó đi. |
|
|
|
|
27-06-2006, 09:24 AM
|
#49 |
|
Đệ tử 3 túi
Tham gia ngày: Jun 2006
Bài gửi: 51
: |
Hihihi!
Thằng cha Tùng này gửi sớm qua' Em cũng xin thông báo địa chỉ luôn. Trần Hoàn. 90A/C21 Lý Thường Kiệt P14 Q10 TpHCm. Em cả bạn Tùng sẽ cùng tiến hành một mô hình Mai bọn em sẽ đưa mô hình lên. Chúc buổi sáng vui vẻ. Hoanf |
|
|
|
|
27-06-2006, 12:15 PM
|
#50 |
|
PIC Bang chủ
Tham gia ngày: May 2005
Bài gửi: 2,631
: |
HO XUAN TUNG
200 - PHUNG KHOANG - TRUNG VAN - TU LIEM - HANOI THANKS! Đây là địa chỉ của một bạn khác gửi mail cho mình, mình đưa lên đây để ghi nhớ luôn. Chúc vui.
__________________
Công ty TNHH Thương mại và Giao nhận R&P store.hn@rpc.vn - store.hcm@rpc.vn Học PIC như thế nào? |
|
|
|
|
27-06-2006, 03:37 PM
|
#51 |
|
Đệ tử 6 túi

Tham gia ngày: Jun 2005
Bài gửi: 141
: |
Động cơ của mình là 53W
Trục động cơ có kích thước fi10mm Định làm mấy cái tải bằng sắt kích thước khoảng 30mmx50mmx50mm Không biết thế có đủ nặng và to không nhỉ falleaf? |
|
|
|
|
27-06-2006, 10:25 PM
|
#52 |
|
PIC Bang chủ
Tham gia ngày: May 2005
Bài gửi: 2,631
: |
Ước lượng:
Công suất động cơ khoảng 53W, công suất động cơ dùng cho cái quạt máy chạy trong nhà chỉ khoảng 40W. Tuỳ theo tốc độ quay, năng lượng = lực * vận tốc. Như vậy, chuyển qua chuyển động quay, thì nó là moment * vận tốc góc. Khi đó, cần phải cân đối giữa vận tốc góc muốn điều khiển, và moment của động cơ. Nếu bạn dùng cục tải có moment quán tính lớn, thì vận tốc quay khó điều khiển, nó gọi là quán tính, có nghĩa là muốn làm cho nó quay cũng khó mà nó đang quay dừng lại cũng khó. Hiểu nôm na là vậy, vì bạn xem mô hình động cơ, ảnh hưởng của moment quán tính nằm ở dưới mẫu trong hàm truyền động cơ + tải. tính sơ bộ một đĩa tròn (F không tính trụ tròn, để lại cho các bạn tính), thì Cho nên, R ảnh hưởng nhiều đến moment quán tính hơn khối lượng. Nếu bạn làm R quá to, thì nó sẽ ảnh hưởng nhiều, nếu bạn thay vật liệu, nó ảnh hưởng theo khối lượng vật liệu mà thôi. Mà khối lượng vật liệu lại tỉ lệ với bậc 3 của kích thước. Như vậy bạn thấy, kích thước ảnh hưởng một cách rất lớn lên moment quán tính. Đây là một điểm mà các bạn cần phải chú ý khi có ý định thay đổi kích thước của tải, và cũng ước lượng được mức độ thay đổi kích thước tải ảnh hưởng lên moment quán tính cỡ bao nhiêu. Xong điểm thứ nhất. Thử tải, với các động cơ lớn, công nghiệp, F không dám giới thiệu phương pháp thử này, nhưng với các động cơ nhỏ, thì đây là một cách thử bằng kinh nghiệm. Các bạn chú ý rằng: P = U*I = U^2/R Như vậy, P sẽ tỉ lệ với bình phương của U. Nếu các bạn giảm U đi 2 lần, thì các bạn sẽ thấy P giảm đi 4 lần. R của động cơ là không đổi. Các bạn xem lại mô hình động cơ mà F đã gửi link. Các bạn sẽ thấy rằng, U quan hệ với moment động cơ như thế nào Khi đó, các bạn có thể ước lượng như sau, tay người khi xoắn một vật vào khoảng 70lbin (cái này F nhớ không chính xác, khoảng 8Nm thì phải). Như vậy, bạn giảm V đến khi nào tay người có thể giữ được động cơ, thì có thể từ đó tính ra lực tải tối đa, ước lượng được với 24VDC thì lực tải sẽ khoảng bao nhiêu, và cũng ước lượng được với cục tải như vậy, vận tốc của động cơ sẽ khoảng bao nhiêu. Còn chọn cục tải cỡ nào để chúng ta làm thí nghiệm cho dễ thấy, thì cái rotor bản thân nó cũng có moment quán tính, và khối lượng của nó bằng khoảng nửa khối lượng động cơ. Bạn chỉ cẩn làm cục tải cầm cỡ cỡ khối lượng động cơ thì lúc đó cục tải sẽ có moment quán tính lớn hơn gấp đôi moment quán tính rotor (nếu như kích thước cục tải bằng kích thước rotor, tức là bán kính nhỏ như cái động cơ). Nếu như cùng khối lượng đó, nhưng mà thay đổi R, thì theo tinh thần tính toán ở trên kia, cứ tăng R gấp đôi, thì moment quán tính sẽ tăng khoảng 2^2 lần (lưu ý trên kia moment quán tính chỉ mới tính cho đĩa dẹp thì nó là 2^2 lần, nhưng nếu có thêm kích thước dày thì các bạn phải tính lại nhé). Các bạn ước lượng làm sao, để moment quán tính của tải lớn hơn nhiều lần so với moment quán tính của rotor, thì sau này khi tính toán, có thể coi moment quán tính của rotor là nhỏ. Đây là một cách để thiết kế cục tải. Tóm lại, những ý rời rạc và chung chung này, cung cấp cho các bạn một vài phương hướng ước lượng để chọn một cục tải vừa phải, tầm tầm, làm sao để cho chúng ta có thể thực hiện bài thí nghiệm, và quan sát tốt, chứ đúng ra về phương diện điều khiển, thì tải phải là cái cho trước, vì ở đây chúng ta không đi làm cái việc thiết kế máy. Có lẽ bài toán thiết kế tải để tối ưu động cơ, thì anh Nam sẽ có thể giải thích chi tiết hơn, vì anh Nam chuyên về động cơ. Còn F chỉ có thể ước lượng mà thôi. Hình sau mô tả mối quan hệ giữa dòng của động cơ, moment tải và vận tốc, bằng các thông tin trên, các bạn có thể tìm ra các đường dốc này, và chọn một cục tải ở mức trung bình. Đây cũng là một cách chọn tải. 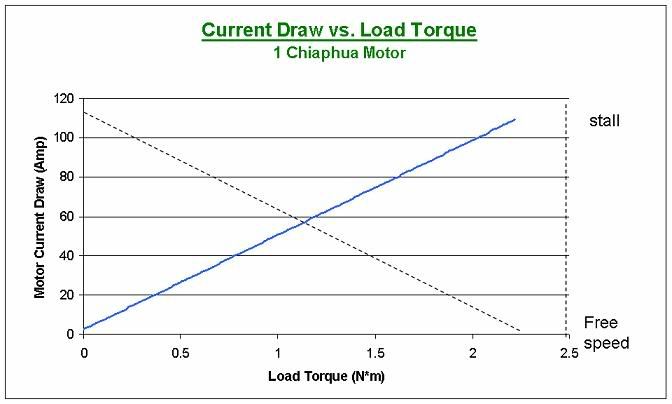 Nhờ anh Nam giúp về việc chọn tải để tối ưu hoá việc điều khiển động cơ. Nếu bài toán chọn tải tối ưu (hơi ngược, vì người ta có tải thì người ta sẽ chọn động cơ để tối ưu), nhưng có cách nào ước lượng được tốt, nhờ anh Nam tiếp tay vậy. Chúc vui
__________________
Công ty TNHH Thương mại và Giao nhận R&P store.hn@rpc.vn - store.hcm@rpc.vn Học PIC như thế nào? |
|
|
|
|
28-06-2006, 12:23 AM
|
#53 |
|
Trưởng lão PIC bang
Tham gia ngày: Feb 2006
Nơi Cư Ngụ: Tp. HCM, Việt Nam
Bài gửi: 3,025
: |
Trong thực tế thì tải có nhiều hình dạng, và kích thước, và chúng ta thường không thể ép buộc người dùng về việc chọn lựa hình dạng, kích thước. Do đó, động cơ có thể làm việc với nhiều loại tải khác nhau, với mômen quán tính có thể nhỏ hơn hay lớn hơn của động cơ. Thông thường mômen quán tính của tải là lớn hơn của động cơ.
Chúng ta có thể làm theo cách sau để xác định mômen quán tính tương đối của tải so với của động cơ (chính xác hơn là của hệ rôto trong động cơ, vì stato không quay). Trước hết chúng ta đo đáp ứng tốc độ theo thời gian của động cơ khi không tải, động cơ được đóng vào nguồn điện có giá trị nhỏ hơn điện áp định mức (khoảng 1/3 đến 1/2 điện áp định mức) để tránh dòng điện khởi động quá lớn (dù là khởi động không tải). Sau đó chúng ta đo đáp ứng tốc độ theo thời gian của động cơ khi có tải, cũng với nguồn điện như trên. Có thể tính gần đúng là tỷ số của mômen quán tính của trường hợp sau (bằng tổng mômen quán tính của động cơ và của tải) với mômen quán tính của trường hợp đầu (chỉ có mômen quán tính của động cơ) bằng tỷ số của thời gian tăng ở trường hợp sau với thời gian tăng ở trường hợp đầu. Nên làm tải hình trụ với đường kính bằng khoảng 1/2 đến 2/3 đường kính động cơ, và chiều dài tương đương với chiều dài của động cơ. Trong các hệ truyền động thì mômen quán tính tương đối của tải so với của động cơ có ý nghĩa hơn giá trị tuyệt đối của mômen quán tính. Nói thêm một chút về cách xác định mômen định mức của động cơ. Động cơ của bạn tinhthanthep có thông số: 38V, 1.9A, 53W, 3700 rpm. Công suất đầu vào định mức = 38Vx1.9A = 72.2W Công suất đầu ra định mức = 53W Hiệu suất định mức = 53/72.2 = 73.4% Tốc độ định mức = 3700 rpm = 387.5 rad/s Mômen định mức = 53W/387.5 rad/s = 0.137 Nm Khi khởi động (mở máy) thì dòng điện tăng lên nhiều lần, giả sử bằng 10 lần dòng định mức, khi đó mômen mở máy sẽ bằng 10 lần mômen định mức (nghĩa là 1.37 Nm trong ví dụ trên). Với dự án của chúng ta thì các bạn có thể chọn tải với mômen quán tính bằng với của động cơ (nghĩa là bạn sẽ có tỷ số giữa thời gian tăng khi khởi động có tải và không tải là 2). Thân,
__________________
Biển học mênh mông, sức người có hạn. Đang gặp vấn đề cần được giúp đỡ? Hãy dành ra vài phút đọc luồng sau: http://www.picvietnam.com/forum/showthread.php?t=1263 |
|
|
|
|
29-06-2006, 09:08 AM
|
#54 |
|
Đệ tử 6 túi
Tham gia ngày: Jun 2005
Bài gửi: 141
: |
Hình chụp của động cơ của tớ đây:
Tớ đang đi đặt làm cái gá cơ khí và tải. Một vài hôm nữa là sẽ có ảnh. |
|
|
|
|
29-06-2006, 09:41 AM
|
#55 |
|
Đệ tử 3 túi
Tham gia ngày: Jun 2006
Bài gửi: 51
: |
HIHI. Chào buổi sáng mọi người!
Em và bạn bluepine đã làm xong mô hình hôm nay post hình cho mọi người coi Mô hình khá đẹp (khá tốn tiền  ) )Một điều tụi em đang quan tâm là làm sao tìm được datasheet của cái động cơ quỷ quái này.(do nó kô ghi thông số trên vỏ và bọn em đã tìm thử nhưng rất khó kiếm) Sau đây là các chữ còn lưu lại trên động cơ: JAMAGAWA SEIK CO.LTD DC MOTOR ENCODERS Chỉ được có bấy nhiêu các anh à Ngoài ra các anh có sơ đồ mạch nguồn nào khoảng 50W điện áp có thể tinh chỉnh được gửi cho bọn em để test thử cái động cơ. 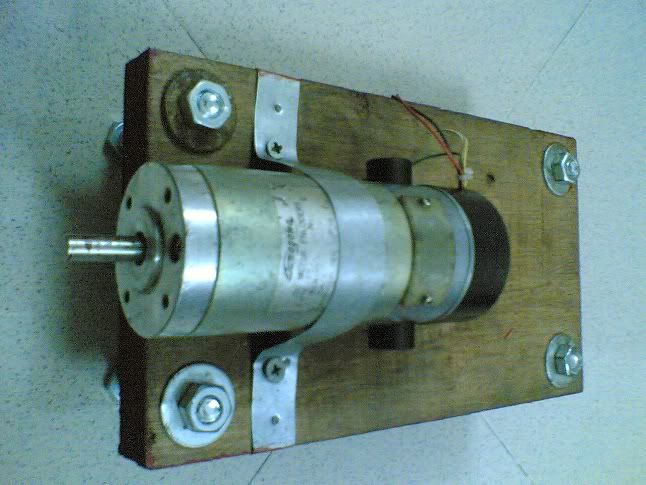 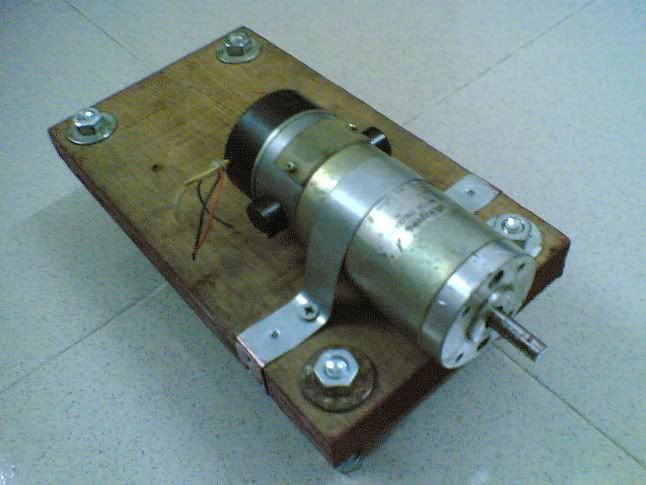   Chúc mọi người vui vẻ. hoanf thay đổi nội dung bởi: falleaf, 29-06-2006 lúc 12:29 PM. |
|
|
|
|
29-06-2006, 09:47 AM
|
#56 |
|
Đệ tử 6 túi
Tham gia ngày: Mar 2006
Bài gửi: 129
: |
Động cơ tamgawa mình đã up dataheet ở trên rồi đó nó có nhiều loại từ 30W tới 200W bạn coi trong datasheet giống loại nào nhất.
Động cơ tamgawa thì econder của nó 8 chân 4 chân đen đều nối mass, chân vàng là reference chân xanh dương và xanh lá là pha A và pha B (hoặc ngược lại). MÌnh đang có 1 cái 100W 1000 xung mà encoder bì hư rồi đang kiếm cái khác đây (hic hic 2 cái 1000xung đều ko có cái encoder nào xài được) thay đổi nội dung bởi: scentoflove, 29-06-2006 lúc 09:54 AM. |
|
|
|
|
29-06-2006, 11:44 AM
|
#57 |
|
Đệ tử 6 túi
Tham gia ngày: Jun 2005
Bài gửi: 141
: |
Bạn dùng nguồn máy tính mà thử. Nguồn máy tính công suất tới 250W hoặc 300W, điện áp thì có nấc 5V và 12V. Trước khi cắm vào nguồn máy tính bạn nên đo qua điện trở của động cơ. Nếu thấy điện trở bé quá thì mắc nối tiếp một con điện trở công suất hoặc biến trở công suất để hạn dòng chạy qua động cơ.
|
|
|
|
|
29-06-2006, 12:42 PM
|
#58 | |
|
PIC Bang chủ
Tham gia ngày: May 2005
Bài gửi: 2,631
: |
Trích:
Phần mayer, em có thể làm cho nó dài ra, đó là một hình thức để làm trục động cơ dài ra. Trên cái bát, em khoan một cái lỗ lớn hơn cái mayer, thì em hoàn toàn có thể đút cái mayer vào, mà cái bát vẫn có thể dày, để đảm bảo độ cứng chắc. Phần đế, sao không bỏ thêm ít tiền, anh nghĩ chỉ khoảng 20 nghìn thôi, để mua mấy miếng mica dày. Tất nhiên, cái này, em phải bắt nó vào một cái cục gì nặng nặng bên dưới, chứ nếu không thì tấm gỗ không thể nào làm đế cho động cơ được. Bạn nào có tiền thì chơi luôn miếng sắt, còn nếu không, thì dùng ê tô kẹp chặt vào mặt bàn để làm thí nghiệm. Anh đề nghị em làm cái tấm bát và cái đế bằng mica đi, như vậy cái mô hình sẽ giá trị hơn nhiều, nhìn chuyên nghiệp hơn. Anh nhớ, mua một miếng mica dày 20mm, và kích thước 7cm x 7cm chỉ có khoảng 7000 đồng. Như vậy là được một tấm bát. Thêm một miếng lớn hơn một chút, là em có được tấm đế. Nhưng tấm đế chỉ cần mica mỏng hơn là được, vì đằng nào em cũng phải bắt nó vào cái gì đó cứng chắc, nếu không động cơ quay sẽ bị rung. Nhắn luôn các bạn khác, nếu các bạn mất công làm rồi, thì nên làm đế và bát bằng nhôm, thép, hoặc mica. Có thể tốn thêm một khoản tiền đấy, nhưng một là, đảm bảo về mặt thiết kế cơ khí (độ cứng vững), hai là mô hình sẽ đẹp và có giá trị hơn rất nhiều. Nếu như nó bị rung, thì phần này nói thiệt là F cũng không biết cách xử lý. Vì trường hợp máy có dao động, thì người ta chỉ xét dao động nhỏ và cộng hưởng, còn ở đây, nếu bắt động cơ không chắc chắn, thì nó rung ... bần bật luôn, kiểu này thì vô phương... Còn vấn đề nữa, các cục tải của em là làm bằng vật liệu gì thế, nếu làm bằng thép thì anh nghĩ oki rồi đó. Chúc vui.
__________________
Công ty TNHH Thương mại và Giao nhận R&P store.hn@rpc.vn - store.hcm@rpc.vn Học PIC như thế nào? |
|
|
|
|
|
29-06-2006, 12:43 PM
|
#59 |
|
PIC Bang chủ
Tham gia ngày: May 2005
Bài gửi: 2,631
: |
Quên nữa, em chú ý nối dây encoder dài ra chút đi, và làm thật kỹ, quấn băng keo chặt lại, vì cái encoder của em nó có đoạn dây có chút xíu à, thao tác hỏng là cứ phải cắt dần, cắt dần đi, như vậy coi chừng đó. Làm cẩn thận nhé em.
Chúc vui
__________________
Công ty TNHH Thương mại và Giao nhận R&P store.hn@rpc.vn - store.hcm@rpc.vn Học PIC như thế nào? |
|
|
|
|
29-06-2006, 12:47 PM
|
#60 |
|
PIC Bang chủ
Tham gia ngày: May 2005
Bài gửi: 2,631
: |
Thủ thuật thao tác với mica:
Nếu các bạn làm việc với mica, các bạn không cần tạo ren để bắt vít đâu, chỉ cần các bạn khoang cái lỗ nhỏ hơn con vít chút, hơ con vít trên ngọn lửa đèn...zippo , cho nó nóng lên, các bạn có thể bắt trực tiếp vào, mica nó chảy ra, và tự tạo ren, đồng thời, khi nó cứng lại, nó bám cứng ngắc vào con vít luôn.Đây chỉ là thủ thuật, thu thuật luôn có cái lợi và cái hại của nó. Thủ thuật là cái để nói ra miệng, nhưng không khuyên dùng. Chúc vui
__________________
Công ty TNHH Thương mại và Giao nhận R&P store.hn@rpc.vn - store.hcm@rpc.vn Học PIC như thế nào? |
|
|
|
|
|
|


 falleaf
falleaf namqn
namqn Linear Mode
Linear Mode

