
|
|
Tài trợ cho PIC Vietnam |
||||||||
| Thực hành Bắt đầu làm một robot như thế nào? Mẹo vặt? Kỹ thuật? Công nghệ?... Hãy bắt tay vào việc... |
 |
|
|
Ðiều Chỉnh | Xếp Bài |
 08-07-2006, 03:45 PM
08-07-2006, 03:45 PM
|
#106 | |
|
PIC Bang chủ

Tham gia ngày: May 2005
Bài gửi: 2,631
:   |
Trích:
Em chú ý làm phần đế cho vững chắc, không thể không làm được đâu. Chúc vui
__________________
Công ty TNHH Thương mại và Giao nhận R&P store.hn@rpc.vn - store.hcm@rpc.vn Học PIC như thế nào? |
|

|

|
|
08-07-2006, 03:50 PM
|
#107 |
|
PIC Bang chủ
Tham gia ngày: May 2005
Bài gửi: 2,631
: |
Quên mất điều này, khi các bạn mua động cơ, mua encoder, thì các bạn nhớ ghi lại những kinh nghiệm mua đồ của mình, mua ở đâu, giá cả bao nhiêu... Tất cả những thông tin này cũng là những thông tin kinh nghiệm.
Có thể khi mua, các bạn có thể tham khảo nhiều loại động cơ khác nhau, giá cả khác nhau, vậy thì kết quả là các bạn chọn mua động cơ hợp lý như thế nào, có các mức giá nào... Đây thực sự là những kinh nghiệm rất hữu ích. Ngay cả việc gia công, tiện cục tải, tiện ở đâu, giá cả bao nhiêu? Có bạn nào ở đây có thể tiện miễn phí, hoặc giá rẻ cho mọi người?... Hãy chia sẻ những kiến thức thực tế đó. Với F, kinh nghiệm là kiến thức, kiến thức mà không dùng thì không thể thành kinh nghiệm được. Cho nên, dù gì thì kinh nghiệm vẫn luôn quý hơn kiến thức một chút (theo cách nghĩ của F). Chúc vui
__________________
Công ty TNHH Thương mại và Giao nhận R&P store.hn@rpc.vn - store.hcm@rpc.vn Học PIC như thế nào? |
|
|
|
|
08-07-2006, 09:08 PM
|
#108 |
|
Đệ tử 6 túi
Tham gia ngày: Mar 2006
Bài gửi: 129
: |
Em cho đk thử 2 cục tải tròn và tải vuộng với PID (1,0,0) thì thấy là ko rung cho lắm.
Chiếu này làm thử với cục tải hình dạng bất kì do ko cân bằng nên nó rung mạnh ở vận tốc cao dk thử ở tốc dộ thấp thì ok Cái đế theo ý của anh F thì dộng cơ lắc nó củng lắc theo chỉ có cách là gắn chặt vào một vật nặng. Kiếm 1 vật vừa nặng vừa đẹp thì quả là khó Cục tải thì em gia công o chổ người quen nên chỉ đưa bản vẻ nên ko biết giá cả ra sao) Động cơ thì cái em đang xài mua 1 cặp la 300K (robocon mua chôm làm cái đề tài này). Giá cả thì động cơ khoản 150K trở lại cho 100W, đi mua ở Vĩnh Viễn, nói chung là tùy theo người mua mà người ta bán. |
|
|
|
|
08-07-2006, 10:18 PM
|
#109 |
|
PIC Bang chủ
Tham gia ngày: May 2005
Bài gửi: 2,631
: |
Tất nhiên phải kẹp nó vào một cái đế cứng phía bên dưới, chỉ cần lấy một cục sắt ở dưới là được. Mua cục sắt cứng, nặng, thô, không cần đẹp lắm đâu, ra chợ sắt nhặt đại một cục về, nhờ khoan 4 cái lỗ bắt cả bộ thí nghiệm đó lên là xong.
Giá động cơ có encoder như vậy cũng hợp lý rồi, chịu khó ngồi lâu một chút kỳ kèo chắc cũng rẻ đi được một chút là cùng. Mọi người cùng làm tiếp nhé. Chúc vui
__________________
Công ty TNHH Thương mại và Giao nhận R&P store.hn@rpc.vn - store.hcm@rpc.vn Học PIC như thế nào? |
|
|
|
|
08-07-2006, 11:17 PM
|
#110 |
|
Đệ tử 1 túi
Tham gia ngày: Jun 2006
Bài gửi: 12
: |
Cho mình tham gia với, nhưng mình cũng chưa biết gì nhiều, ví dụ như cái encoder gì đó mình cung không biết là cái gì. Nhưng dù sao mình cũng tham gia dự án này, bởi vì như anh HẢi Âu nói chúng ta có thể tạo nên những công cụ giúp những người nông dân.
Mình nghĩ nên có địa điểm tập trung nào đó để anh em cùng làm, vừa tiết kiệm thời gian vừa được học hỏi nhiều kinh nghiệm. Stevent. vuhoaihung@yahoo.com |
|
|
|
|
08-07-2006, 11:33 PM
|
#111 |
|
PIC Bang chủ
Tham gia ngày: May 2005
Bài gửi: 2,631
: |
__________________
Công ty TNHH Thương mại và Giao nhận R&P store.hn@rpc.vn - store.hcm@rpc.vn Học PIC như thế nào? |
|
|
|
|
10-07-2006, 11:47 PM
|
#112 | |
|
Đệ tử 6 túi
Tham gia ngày: Mar 2006
Bài gửi: 129
: |
Trích:
Càng đi sâu vào lý thuyết càng thấy nhiều cái mới lạ, khó hiểu |
|
|
|
|
|
11-07-2006, 12:03 AM
|
#113 |
|
Đệ tử 3 túi

Tham gia ngày: Jul 2005
Bài gửi: 47
: |
Cái này không phải ở một sơ đồ cụ thể nào cả! Mà đó là phương pháp PWM hai cực tính. Ưu điểm:
- Dòng điện luôn liên tục - Vận hành động cơ ở 4 góc tọa độ - Loại bỏ vùng chết ma sát tĩnh - Dễ khởi động ở vùng vận tốc thấp - Ổn định tốt ở vận tốc thấp.... Không ai post lý thuyết lên đây được đâu  Chịu khó đọc sách nhá! Chịu khó đọc sách nhá!Cơ sở Điều Khiển Tự Động Truyền Động Điện (đã giới thiệu ở 1 bài trước) trang 251. Còn làm thế nào để thực hiện? Rất đơn giản! Lấy cái cầu H sẵn có ra, đưa 2 xung ngược nhau vào chân điều khiển của 2 nửa cầu! Thế thôi! Khi đó áp qua động cơ sẽ lật liên tục! Nếu duty cycle =50% Động cơ đứng yên, >50% nó quay theo 1 chiều, <50% quay theo chiều ngược lại! Do đó phạm vi điều tốc giảm đi 1 nửa, vì vậy tốt nhất là sử dụng PWM 16 bit. Nhược điểm lớn nhất của nó là tổn hao lớn do cả 4 van công suất đều đóng mở liên tục! |
|
|
|
|
12-07-2006, 06:52 PM
|
#114 |
|
PIC Bang chủ
Tham gia ngày: May 2005
Bài gửi: 2,631
: |
Cho tới giờ mới có 2 mô hình đã làm xong được gửi lên đây, tất nhiên là chưa hoàn thiện lắm. Vậy thì các anh em khác cũng hoàn thiện sớm mô hình nhé. Giải đoạn thiết kế mạch cầu H, F xin bàn giao lại cho anh Nam, vì tuần sau F phải về VN rồi.
Chúc vui
__________________
Công ty TNHH Thương mại và Giao nhận R&P store.hn@rpc.vn - store.hcm@rpc.vn Học PIC như thế nào? |
|
|
|
|
13-07-2006, 04:16 PM
|
#115 |
|
PIC Bang chủ
Tham gia ngày: May 2005
Bài gửi: 2,631
: |
Danh sách gửi chip
Trần Thành Thanh Tùng, 539/75 cách Mạng Tháng 8, Phường 15, Quận 10, Tp Hồ Chí Minh. (Bluepine)
Trần Hoàn, 90A/C21 Lý Thường Kiệt P14 Q10 TpHCm. (hoanf) HO XUAN TUNG, 200 - PHUNG KHOANG - TRUNG VAN - TU LIEM - HANOI (tinhthanthep) Phạm Phú Anh Nghỉêm 79/H4 Âu Cơ P14 Q11 Tp HCM. (scentoflove) Danh sách này còn thiếu bạn nào không nhỉ? Đề nghị sau khi các bạn làm mô hình xong thì gửi anh lên diễn đàn cho mọi người cùng xem luôn. Đang chuẩn bị PIC cho các bạn làm, vì vậy thống kê danh sách ở đây, khi về VN, F sẽ gửi chip cho các bạn (tuần sau rồi). Anh em gút giai đoạn 1 nhanh lên nhé. Chúc vui PS> Ai chưa có tên trong danh sách mà bắt đầu làm thì cố gắng hoàn thành trong vòng 1 tuần và gửi thông tin nhận chip thêm, để về VN, F sẽ check lại danh sách và gửi chip cho mọi người luôn.
__________________
Công ty TNHH Thương mại và Giao nhận R&P store.hn@rpc.vn - store.hcm@rpc.vn Học PIC như thế nào? thay đổi nội dung bởi: falleaf, 14-07-2006 lúc 01:27 AM. |
|
|
|
|
13-07-2006, 05:21 PM
|
#116 |
|
Đệ tử 3 túi
Tham gia ngày: Jun 2006
Bài gửi: 53
: |
Chào anh F, bọn em rất vui khi biết anh sắp gửi PIC cho bọn em làm.
 còn về phần mô hình thì bọn em đã sửa 2 lần rồi mà vẫn thấy chưa ổn nên đợi các bạn khác pót mô hình lên tham khảo xong để sửa lại luôn cho tốt. Có bạn nào làm xong mô hình rồi tranh thủ pót lên cho mọi người cùng tham khảo cho đỡ mất công nhé. Hiện bọn em đang tìm hiểu thêm về phần tính moment và PWM để vài bữa làm cho nhanh. mến, bluepine |
|
|
|
|
14-07-2006, 01:21 AM
|
#117 | |
|
Đệ tử 6 túi
Tham gia ngày: Mar 2006
Bài gửi: 129
: |
Trích:
|
|
|
|
|
|
14-07-2006, 02:58 AM
|
#118 |
|
Đệ tử 3 túi
Tham gia ngày: Jul 2005
Bài gửi: 47
: |
Một mô hình tìm được trên net
Mọi người tham khảo! thay đổi nội dung bởi: falleaf, 14-07-2006 lúc 06:33 PM. |
|
|
|
|
14-07-2006, 04:14 AM
|
#119 |
|
PIC Bang chủ
Tham gia ngày: May 2005
Bài gửi: 2,631
: |
bluepine, em đã thấy mô hình cách gắn động cơ như vậy chưa, em nên tiếp tục sửa mô hình của em theo cách mà sphinx gửi đó, mô hình này rất đẹp.
Cái hộp đen đen chính là cái driver động cơ mà chúng ta sẽ phải thiết kế. Tất nhiên, cái driver này sẽ điều khiển nhiều mode, đièu khiển vị trí, điều khiển vận tốc, điều khiển torque... Chúng ta sẽ chỉ làm điều khiển vị trí hoặc vận tốc thôi. Mỗi người sẽ lựa chọn điều khiển vị trí hoặc vận tốc, tuỳ theo ý muốn, nhưng chúng ta sẽ tìm hiểu chung hết về điều khiển vị trí và vận tốc. Cái mô hình này rất đẹp.
__________________
Công ty TNHH Thương mại và Giao nhận R&P store.hn@rpc.vn - store.hcm@rpc.vn Học PIC như thế nào? |
|
|
|
|
14-07-2006, 03:00 PM
|
#120 |
|
Đệ tử 3 túi
Tham gia ngày: Jun 2006
Bài gửi: 51
: |
Chào mọi người!
Mô hình của bác Sphinx gửi lên trông Pro thiệt . Tuyệt đẹp.Em mới tìm được một cái mô hình trên mạng kô đẹp bằng mô hình của bác Sphinx nhưng khá đơn giản. Em post hình này lên cho mọi người coi thử và góp ý. Nếu được để bọn em sẽ đổi lại mô hình theo kiểu này nha. Trong mô hình này chúng ta có thể dùng một tấm sắt hoặc thép dày khoảng 2mm-3mm. Sau đó bẻ nó với một góc 90 độ để làm bát bắt động cơ còn phần đế chúng ta có thể khoan lỗ để bắt vào một cái cái gì đó nặng để cố định hoặc là hàn lên một tấm sắt dày hơn. Và trên mặt đế chúng ta có thể đặt board trên đó luôn. Khá tiện. Mọi người góp ý nha. Chúc mọi người cuối tuần vui vẻ Hoanf 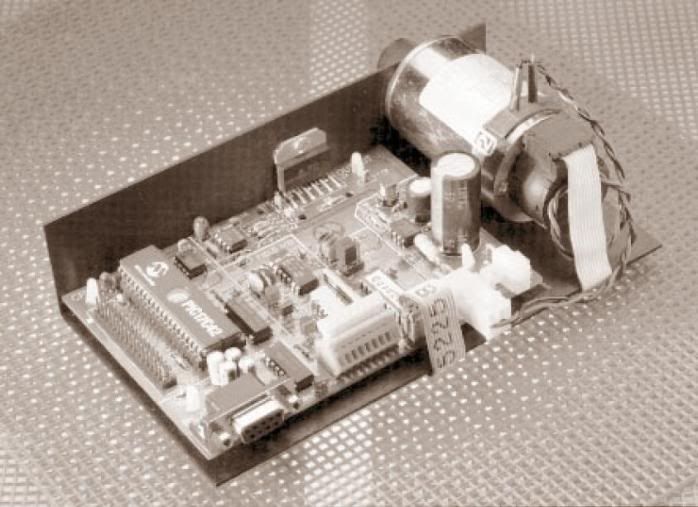 thay đổi nội dung bởi: falleaf, 14-07-2006 lúc 06:32 PM. |
|
|
|
|
|
|


 falleaf
falleaf Linear Mode
Linear Mode

