
|
|
Tài trợ cho PIC Vietnam |
||||||||
| Thực hành Bắt đầu làm một robot như thế nào? Mẹo vặt? Kỹ thuật? Công nghệ?... Hãy bắt tay vào việc... |
 |
|
|
Ðiều Chỉnh | Xếp Bài |
 09-09-2006, 04:13 PM
09-09-2006, 04:13 PM
|
#256 |
|
Đệ tử 3 túi

Tham gia ngày: Jul 2005
Bài gửi: 47
: |
Phần lớn các encoder gắn sau đuôi động cơ không có dây index, muốn biết có hay ko bạn mở nó ra, xem cái đĩa, nếu chỉ có 1 hàng vạch thì tất nhiên là ko có index rồi!
Các encoder bây j chỉ có 1 hàng vạch chứ ko phải 2 như truyền thống (như trong chương trình thiết kế Encoder của anh F chẳng hạn  ) và để tạo ra 2 xung nó dùng 2 mắt thu đặt lệch nhau! Chính vì lý do này mà ta hầu như ko thể thay thế mắt Encoder của động cơ này cho động cơ khác (dù cùng loại) nếu đĩa xung của chúng ko giống hệt nhau! ) và để tạo ra 2 xung nó dùng 2 mắt thu đặt lệch nhau! Chính vì lý do này mà ta hầu như ko thể thay thế mắt Encoder của động cơ này cho động cơ khác (dù cùng loại) nếu đĩa xung của chúng ko giống hệt nhau! |

|

|
|
09-09-2006, 09:25 PM
|
#257 |
|
PIC Bang chủ

Tham gia ngày: May 2005
Bài gửi: 2,631
:   |
Xem bài viết liên quan ở đây.
Nhân cơ hội trả lời một bạn nói về dự án PID, F có nói đôi nét lại một lần nữa về dự án này, các bạn tham gia dự án cũng nên xem qua. http://www.picvietnam.com/forum//sho...=4870#post4870 Chúc vui
__________________
Công ty TNHH Thương mại và Giao nhận R&P store.hn@rpc.vn - store.hcm@rpc.vn Học PIC như thế nào? |
|
|
|
|
10-09-2006, 03:33 AM
|
#258 |
|
Đệ tử 1 túi
Tham gia ngày: Jul 2006
Bài gửi: 14
: |
Cac bac cho em hoi. Em muon thiet ke them phan phan hoi dong ve. Voi IC chuyen dung thi no da co san, con voi mach cau H ma minh tu thiet ke thi phan phan hoi dong ta se phai thiet ke nhu the nao day(thiet ke mot lan cho do ton cong). Em se phai su dung cam bien dong nao, co tu thiet ke duoc ko hay la phải mua? Neu tu thiet ke thi phai thiet ke nhu the nao? Va neu phai mua thi em se phai mua loai nao? o dau? gia ca?
Bac nao biet mong chi giup. Cam on! |
|
|
|
|
11-09-2006, 10:34 AM
|
#259 |
|
Đệ tử 3 túi
Tham gia ngày: Jun 2006
Bài gửi: 53
: |
anh F ơi, sao em vô cái link này để tải tài liệu về PID về xem không được http://www.picvietnam.com/download/PIDcontrolbook2.pdf (link này ở luồng điều khiển PID đó),
anh kiểm tra lại giùm mến, |
|
|
|
|
11-09-2006, 02:05 PM
|
#260 |
|
PIC Bang chủ
Tham gia ngày: May 2005
Bài gửi: 2,631
: |
Anh vô được bình thường, em coi lại thử, có thể em dùng chế độ save về rồi mở ra trên máy để coi, chứ nếu không thì đường truyền bị lỗi (rất hay bị lỗi với file dung lượng lớn), khi đó sẽ không download được.
Chúc vui
__________________
Công ty TNHH Thương mại và Giao nhận R&P store.hn@rpc.vn - store.hcm@rpc.vn Học PIC như thế nào? |
|
|
|
|
11-09-2006, 02:51 PM
|
#261 |
|
Nhập môn đệ tử
Tham gia ngày: Sep 2006
Bài gửi: 1
: |
chao cac bac
minh cung la thanh vien moi, Minh thay cac bac lam cai de tai nay hay day. Minh nghi cac bac co the tham khao cac bai viet ve dieu khien PID cua dong co servo ma cac hang dang ban tren thi truong. Con encorder cac bac nen mua loai phase A, B, Z de cac bac lay duong hoi tiep dua ve con PIC. Cac bac gan truc tiep truc cua Encoder va truc dong co bang khop link de lay tin hieu dong toc. Cac bac nho cach li ngo vao khi giao tiep voi con PIC nha. Cam on cac bac nha. |
|
|
|
|
11-09-2006, 06:18 PM
|
#262 |
|
Đệ tử 3 túi
Tham gia ngày: Jun 2006
Bài gửi: 53
: |
em vô được rồi, thank you
 mến |
|
|
|
|
12-09-2006, 03:59 PM
|
#263 |
|
Đệ tử 6 túi
Tham gia ngày: Mar 2006
Bài gửi: 129
: |
Em chọn Dbst là 1N4148 từ đó tính Cbst
Qg=65nC. Qrr bỏ qua, Ilk,d=10uA, Iqbs=125uA, Igs=1.3mA, ton,max=40us, Vuvlo=9.4V, Vbst=15-1=14V ->Cbst= 0.027uF Giá trị C1,C2=Cbst, C3,C4 trong datasheet IR2110 vẽ nhưng ko đưa giá trị. Các R5-R8 chịu dòng cho zener15V chưa có giá trị 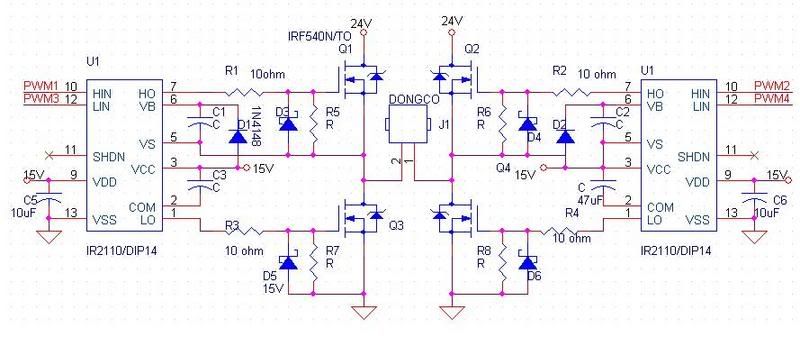 |
|
|
|
|
12-09-2006, 05:44 PM
|
#264 | |
|
Trưởng lão PIC bang
Tham gia ngày: Feb 2006
Nơi Cư Ngụ: Tp. HCM, Việt Nam
Bài gửi: 3,025
: |
Trích:
Các điện trở R5-R8 để chống latch-up cho MOSFET, có thể chọn 4.7 k. Thân,
__________________
Biển học mênh mông, sức người có hạn. Đang gặp vấn đề cần được giúp đỡ? Hãy dành ra vài phút đọc luồng sau: http://www.picvietnam.com/forum/showthread.php?t=1263 |
|
|
|
|
|
12-09-2006, 09:23 PM
|
#265 |
|
PIC Bang chủ
Tham gia ngày: May 2005
Bài gửi: 2,631
: |
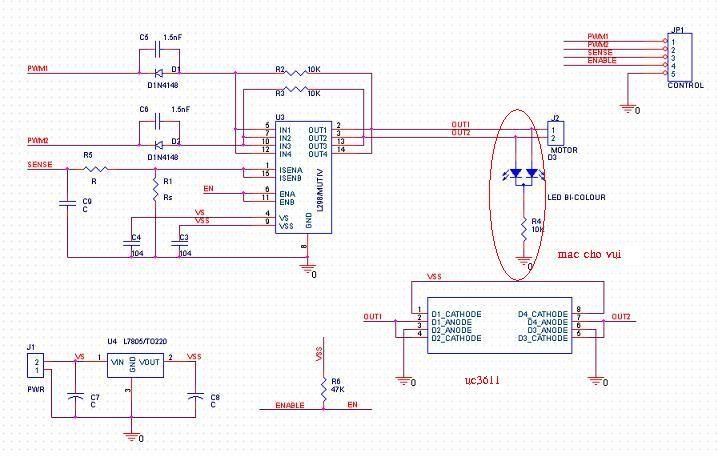 Gửi cái schema này thiết kế cho con L298N, đang định làm nó để chuẩn bị cho phòng thí nghiệm ở HCM và HN. Xin anh Nam cho ý kiến luôn về các giá trị tụ trở mắc kèm theo. Mạch này làm xong thì bé bằng 2 ngón tay, dài bằng 2 đốt tay (đã bao gồm cục tản nhiệt to oạch phía sau). Chúc vui.
__________________
Công ty TNHH Thương mại và Giao nhận R&P store.hn@rpc.vn - store.hcm@rpc.vn Học PIC như thế nào? thay đổi nội dung bởi: falleaf, 12-09-2006 lúc 09:30 PM. |
|
|
|
|
12-09-2006, 11:43 PM
|
#266 |
|
Đệ tử 6 túi
Tham gia ngày: Mar 2006
Bài gửi: 129
: |
Em muốn làm phần phản hồi dòng điện luôn anh namqn giúp em phần này
|
|
|
|
|
13-09-2006, 12:41 PM
|
#267 |
|
Nhập môn đệ tử
Tham gia ngày: Apr 2006
Bài gửi: 2
: |
Các bác ơi em có con Mô tơ ký hiệu: PU5912V.
Tìm mãi trên mạng không có datasheet. Bác nào biết điều khiển hắn giúp em với. Cám ơn các bác |
|
|
|
|
13-09-2006, 06:27 PM
|
#268 | |
|
Trưởng lão PIC bang
Tham gia ngày: Feb 2006
Nơi Cư Ngụ: Tp. HCM, Việt Nam
Bài gửi: 3,025
: |
Trích:
Các ngõ vào của L298N là dạng TTL, do đó không cần làm phức tạp hóa mạch đâu em. Em có thể bỏ phần mạch R, C, và D ở các chân input của L298N. Nếu nguồn đã ổn áp thì C7 không cần lớn, vài uF là được. C8 cũng chỉ cần vài uF, nếu có tụ tantalum thì nên dùng (lọc nhiễu cho phần logic của L298N). Rs thì phải chọn tùy theo cỡ dòng điện qua mạch cầu H của L298N. Nếu dòng max cỡ 1A thì có lẽ chọn 0.1 ohm (sẽ cần có một mạch khuếch đại dùng OPAMP loại rail-to-rail input). Mạch lọc mắc song song với Rs thì có thể dùng R = 220 ohm, C = 1 nF. Thân,
__________________
Biển học mênh mông, sức người có hạn. Đang gặp vấn đề cần được giúp đỡ? Hãy dành ra vài phút đọc luồng sau: http://www.picvietnam.com/forum/showthread.php?t=1263 |
|
|
|
|
|
13-09-2006, 06:29 PM
|
#269 | |
|
Trưởng lão PIC bang
Tham gia ngày: Feb 2006
Nơi Cư Ngụ: Tp. HCM, Việt Nam
Bài gửi: 3,025
: |
Trích:
Thân,
__________________
Biển học mênh mông, sức người có hạn. Đang gặp vấn đề cần được giúp đỡ? Hãy dành ra vài phút đọc luồng sau: http://www.picvietnam.com/forum/showthread.php?t=1263 |
|
|
|
|
|
13-09-2006, 08:16 PM
|
#270 |
|
Đệ tử 6 túi
Tham gia ngày: Mar 2006
Bài gửi: 129
: |
Rs mắc giữa chân isenA và mass, mạch cầu H thì mình sẽ mắc Rs như thế nào anh
|
|
|
|
|
|
|


 falleaf
falleaf namqn
namqn
 Linear Mode
Linear Mode

